

近年来,随着汽车行业、尤其是电动汽车行业的高速发展,智能停车场景下的汽车充电和养护等主题越来越受到大众关注。
为满足相应需求、进一步赋能智能出行领域的合作伙伴,非夕科技推出通用性强、灵活度高、安全可靠、部署简易的复合移动自适应机器人新能源汽车自动充电方案。
点击此处链接查看视频:https://mp.weixin.qq.com/s/o0L1UJpC82EIomdIDYUH1w
方案背景
对新能源汽车而言,充电的重要性不言而喻,根据中国电动汽车充电基础设施促进联盟数据显示,截止2021年9月底,国内充电基础设施数量222.3万台,车桩比约3.05:1,存在着一定程度上的充电桩缺口。而目前大部分的新能源汽车充电由人工手动操作,带来诸如充电桩利用效率低、停车场空间利用率低下、车主时间分配受限等问题,对汽车品牌、社区场所、车主都造成了影响。由此,汽车充电的自动化、多覆盖需求愈发明显。
方案构成
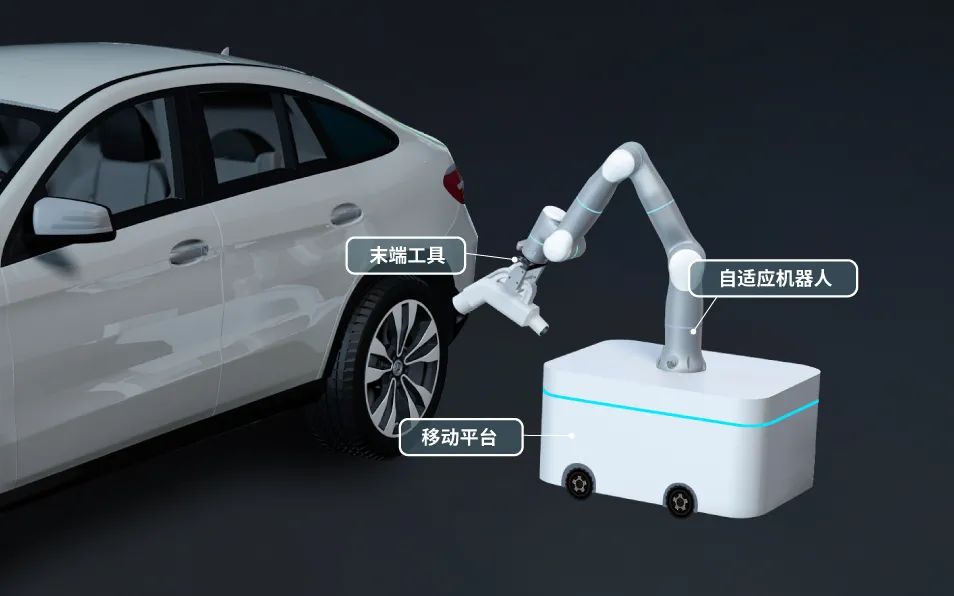
技术优势
工业级力控能力确保完成柔性插接
自适应机器人具备高精度、高频响的力觉响应和控制能力,能够容忍由可移动平台、周围环境带来的位置误差,在插入过程中通过力控晃动实现柔性插接,避免对充电枪、充电口的损伤或损耗,5s内可完成插接动作。
机器视觉与深度学习实现二次定位
机器人移至充电口附近后,通过机器视觉采集充电口所在的具体位置,并采用精度可达像素级细粒度的卷积神经网络算法进行深度学习,辅以由数据驱动保证的环境自适应能力,实现对充电口及设备高效、准确的二次定位。
通用抓取增强通用性和稳定度
非夕自主研发的通用抓取算法帮助机器人对未知物体进行快速抓取,无需提前建模,对光照因素不敏感。这使得此方案能通用于不同品牌、型号的充电枪,并在较差的光照条件下稳定进行抓取工作。
未来,非夕会与智能出行领域的伙伴一同打造更多立足实际需求的创新自动化方案,共创更加完善、智能、安全、省心的用户体验。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 AEQUOR/爱国全自动焊接机器人 焊接机器人研发厂家
AEQUOR/爱国全自动焊接机器人 焊接机器人研发厂家 焊接机器人国际排名 激光焊接机器
焊接机器人国际排名 激光焊接机器 博塔制造的重型、特殊可调防窜滚轮架 供应洛阳博塔滚轮架
博塔制造的重型、特殊可调防窜滚轮架 供应洛阳博塔滚轮架 郑州塑料板 塑料焊条 PVC焊条 聚丙烯焊条 pp塑料焊条 pp焊条
郑州塑料板 塑料焊条 PVC焊条 聚丙烯焊条 pp塑料焊条 pp焊条 佳士TIG200S家用逆变直流氩弧电焊机
佳士TIG200S家用逆变直流氩弧电焊机 自动化焊接 厂家气保焊自动焊接设备 自动焊机环缝焊机
自动化焊接 厂家气保焊自动焊接设备 自动焊机环缝焊机 供应瑞典ESAB310LMo焊条
供应瑞典ESAB310LMo焊条 上海通用氩弧焊机WSM-400T逆变式直流脉冲氩弧焊机手工电弧焊工业焊机
上海通用氩弧焊机WSM-400T逆变式直流脉冲氩弧焊机手工电弧焊工业焊机








