
机器人工作经常会出现故障,那么当出现机器人焊钳零点的故障如何处理呢?且看以下方案:
故障描述:由于机器人焊钳编码器线损坏导致机器外部轴机械零点丢失,无法正常工作。
操作流程如下
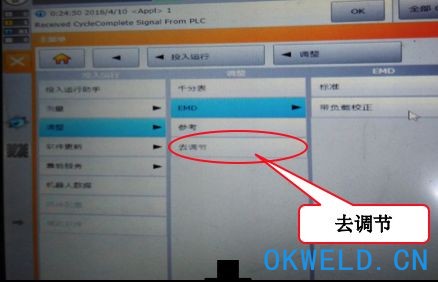
第一步:记录外部轴零点丢失时,程序指针的当前位置,点击取消程序,进入示教器主菜单,选择投入运行--调整--去调节(如图1)。
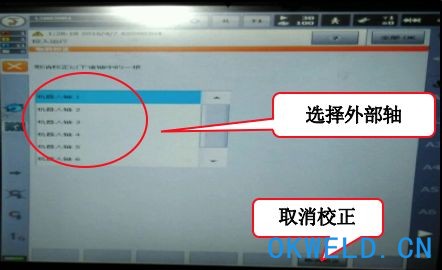
第二步:选择外部轴,并点击取消校正(如图2)。
第三步:将机器人焊钳旧帽换成新帽,同时选择附加轴,按住E1处+,直到焊钳两个电极帽之间恰好贴合(如图3)。

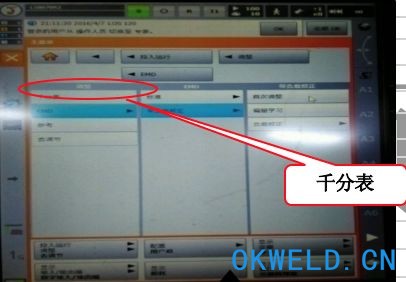
第四步:进入示教器主菜单,选择投入运行-调整-千分表`,选择E1轴(如图4)。
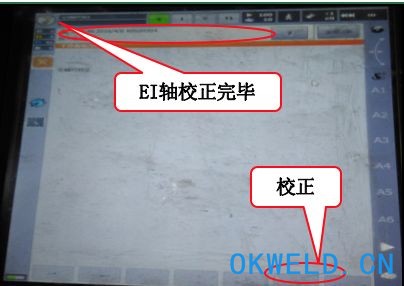
第五步:界面显示E1轴,点击校正,示教器显示E1校正完毕,手动运行换帽和修磨程序(如图5)。
第六步:运行机器人程序进行轨迹验证。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 气保焊机 二保焊机 二氧化碳保护焊机 二氧化碳气体保护焊机家用
气保焊机 二保焊机 二氧化碳保护焊机 二氧化碳气体保护焊机家用 柴油拖拉焊 双工位电焊机 长输管道电焊机 半自动电焊机
柴油拖拉焊 双工位电焊机 长输管道电焊机 半自动电焊机 瑞凌东升 WSME-400交直流脉冲氩弧焊机 铝焊机 多功能氩弧焊机厂家
瑞凌东升 WSME-400交直流脉冲氩弧焊机 铝焊机 多功能氩弧焊机厂家 25L化工桶为什么会变形?
25L化工桶为什么会变形? 越达科技焊接变位机 ZHB-10变位机 定制变位机价格 变位机质量可靠
越达科技焊接变位机 ZHB-10变位机 定制变位机价格 变位机质量可靠 耐高温电缆接头用防火毯 柔性防火防爆毯隆泰鑫博
耐高温电缆接头用防火毯 柔性防火防爆毯隆泰鑫博 焊接机器人
焊接机器人 佳贝瑞JBR20160901 PP焊条、耐酸碱、透明PP焊条、进口优质焊条 pp焊条
佳贝瑞JBR20160901 PP焊条、耐酸碱、透明PP焊条、进口优质焊条 pp焊条








