
随着科技的不断进步,携手机器人共同打造梦幻般的视觉体验,未来3D视觉系统将成为机器人标准的附加设备。
为了让大家零距离观察3D视觉效果:卡诺普机器人支持3D视觉完成电容锡焊接应用,机器人案例采用3D视觉精确识别技术,而不是人工完成机器人精确定位,缓解了工人难以定位的压力,大大提高了锡焊接工作效率。
采用卡诺普CRP-RH14-10机器人,采用3D视觉引导机器人完成锡焊工艺。该设备主要用于机器人完成锡焊工艺而不是人工视觉定位的3D视觉。
锡焊步骤卡诺普机器人:
1.首先用焊枪的下压压紧气缸对工件进行压紧(工件在整个焊接过程中始终受压)
2.焊枪头向工件附近下降,开始对工件进行大约五秒钟的预热(焊枪头的加热温度在350℃左右)。
3.大约15秒的填充时间为送丝融化至充满焊接区域。
4.枪头上台,在工件冷却前,下压气缸保持工件压制约5秒钟。
5.将气缸压紧,离开工件,焊接结束。
卡诺普机器人配备了锡焊工具,通过与卡诺普机器人的有效通信连接,大大降低了锡焊对人体的危害,高效完成了锡焊工件的精准定位。
汽车行业:纯电动汽车、混合动力汽车、电力机车行业:机车牵引变流器、地铁、高速铁路、轻轨、有轨电车等部件的准确定位。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 湘江502/4.0电焊条碳钢碱性电焊条
湘江502/4.0电焊条碳钢碱性电焊条 焦作 ABB MIG 焊接机器人
焦作 ABB MIG 焊接机器人 工厂加工304材质不锈钢网框
工厂加工304材质不锈钢网框 鼎东激光切割机功率与板厚 激光切割机 厂家
鼎东激光切割机功率与板厚 激光切割机 厂家 DACHENG 大呈 氩弧焊接机器人 自动焊接机器人 六轴关节焊接机器人-专业自动化焊接集成专业厂家
DACHENG 大呈 氩弧焊接机器人 自动焊接机器人 六轴关节焊接机器人-专业自动化焊接集成专业厂家 瑞凌东升电焊机 二氧化碳焊机二保焊机 NBC-350气保焊机
瑞凌东升电焊机 二氧化碳焊机二保焊机 NBC-350气保焊机 铜焊条 铜合金焊条 紫铜焊条 磷青铜焊条 铝青铜焊条 硅青铜焊条
铜焊条 铜合金焊条 紫铜焊条 磷青铜焊条 铝青铜焊条 硅青铜焊条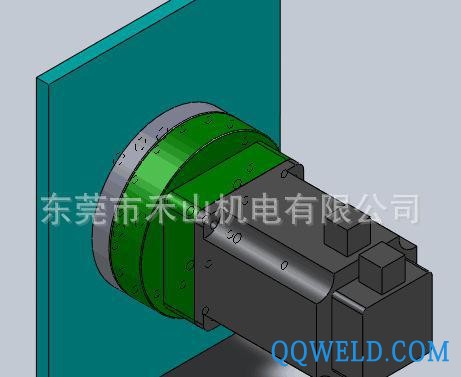 焊接变位机转台专用负载可达1吨专为变位机安装设计RV-80E-121
焊接变位机转台专用负载可达1吨专为变位机安装设计RV-80E-121








