
今天,工业机器人的先进水平令人惊叹,尤其是那些灵活的5轴和6轴机器人。工业机器人的驱动源通过传动部件驱动关节的运动或旋转,从而实现身体、手臂和手腕的运动。因此,传动部件是工业机器人的重要部件。根据不同的传动类型,传动部件可分为线性传动机构和旋转传动机构。有了如此多的主动关节,还可以实现精确的运动和命令传输,每个部分紧密协作完成复杂的工作。关节主要是指工业机器人最重要的基础部件,也是运动的核心部件:精密减速器。这是一种精确的动力传递机制。齿轮的速度转换器用于将电机的转数减少到所需转数,并获得更大的扭矩装置,从而降低速度并增加扭矩。工业机器人关节传动链的特点?
1.工业机器人的电源一般为交流伺服电机。由于脉冲信号驱动,伺服电机本身可以实现速度调节
工业机器人通常重复相同的过程;
2.为了确保工业机器人能够可靠地完成生产中的工艺任务,保证工艺质量,对工业机器人的定位精度和重复定位精度要求较高。
因此,有必要提高和确保工业机器人rv减速器或谐波减速器的精度。
3.工业机器人中精密减速电机的另一个功能是传递更大的扭矩。当负载较大时,盲目增加伺服电机的功率并不划算,减速器可以在适当的速度范围内增加输出扭矩。
4、伺服电机在低频运行时容易产生热量和低频振动,不利于工业机器人长期周期性工作,也不利于保证其准确可靠运行。精密减速电机的存在使伺服电机能够以适当的速度运行,并将速度精确地降低到工业机器人各部分所需的速度,从而提高机械体的刚度并输出更大的扭矩。
工业机器人关节传动链的特点 特点包括哪些作用?与普通减速机相比,机器人关节减速机具有传动链短、体积小、功率大、重量轻、控制方便等特点。关节机器人中广泛使用的减速机有两种类型:rv减速机和谐波减速机。同步带传动的优点:无滑动,传动比准确,传动平稳;大速比范围;初始张力小;轴和轴承不易过载。然而,这种传动机构的制造和安装要求严格,皮带的材料要求高,因此成本高。同步带传动适用于电机与减速器之间的高减速比传动。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 厂家专卖对焊机un10对焊机 钢丝对焊机 金属锯条对焊机拔丝对焊机家用对焊机
厂家专卖对焊机un10对焊机 钢丝对焊机 金属锯条对焊机拔丝对焊机家用对焊机 利安特标准型 PVC焊条 硬质PVC焊条 焊接PVC板材 塑料焊条 厂家直销
利安特标准型 PVC焊条 硬质PVC焊条 焊接PVC板材 塑料焊条 厂家直销 OTC机器人 喷涂机器人,自动焊接机器人,切割机器人,钣金装备解决方案
OTC机器人 喷涂机器人,自动焊接机器人,切割机器人,钣金装备解决方案 铭丰高原蒸饭柜价格
铭丰高原蒸饭柜价格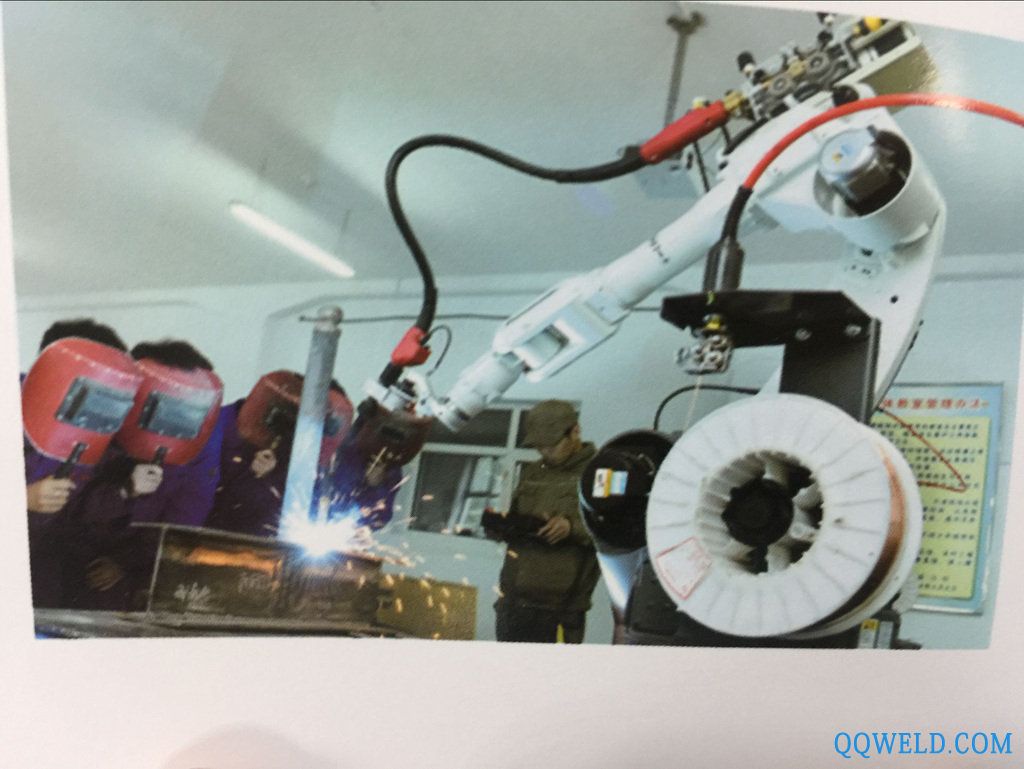 OTC焊接机器国产国内汽车焊接机器人品牌人生产厂家焊接机器人价格ABB松下弧焊自动焊接组配件工业焊接机器人视频有文章解释
OTC焊接机器国产国内汽车焊接机器人品牌人生产厂家焊接机器人价格ABB松下弧焊自动焊接组配件工业焊接机器人视频有文章解释 Panasonic/松下电弧焊机,松下气保焊机,松下逆变气保焊机,松下IGBT逆变气保焊机YD-350FR1
Panasonic/松下电弧焊机,松下气保焊机,松下逆变气保焊机,松下IGBT逆变气保焊机YD-350FR1 飞速FSH2040激光切割机, 管材激光切割机 ,高精度金属激光切割机
飞速FSH2040激光切割机, 管材激光切割机 ,高精度金属激光切割机 供应烽火NB-350气保焊机
供应烽火NB-350气保焊机








