
今日分享 OnRobot 产品在电装机器人上基础集成操作(硬件和软件基础设置),文末附有韩华协作机器人、ABB机器人与onRobot 夹爪的快速集成指南快速通道,感兴趣的小伙伴不要错过了~

硬件基础设置
【01】机器人专用安装套件

计算箱v3
电源
转接板-B(#105866)/C(#105866)
接线端子
I/O线
电缆CB-QC(5m M12至M8)
UTP电缆(RJ45至RJ45)
电缆带
U盘
螺钉
【02】单个设置顺序示例
在电装机器人上安装RG2 v2

【03】双重设置顺序示例
在电装机器人上安装VG10 v2和RG2 v2

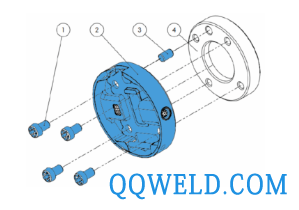
【04】转接板B—机器人套件105866

使用5 Nm的拧紧力矩:
1、M5x8螺钉(ISO14580 A4-70)
2、OnRobot适配器法兰-B(ISO 9409-1-50-4-M6)
3、定位销Ø5x6(ISO2338 h8)
4、机械手工具法兰(ISO 9409-1-31.5-4-M5)
以上适用于以下带电动夹持器连接法兰的机器人型号:
VP-5243、VP-6242、VS-050、VS-060、VS-068、VS-087、VS-6556、VS-6577型号,或VS-050-S2
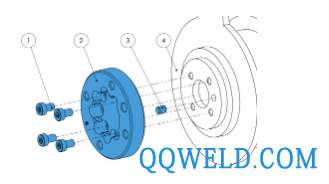
【05】转接板B—机器人套件105866
使用5 Nm的拧紧力矩:
1、M5x12螺钉(ISO14580 A4-70)
2、OnRobot适配器法兰-B(ISO 9409-1-50-4-M6)
3、定位销Ø5x12(ISO2338 h8)
4、机械手工具法兰(ISO 9409-1-31.5-4-M5)
以上适用于以下带标准法兰的VS-050、VS-060、VS-068或VS-087(洁净室型)机器人型号
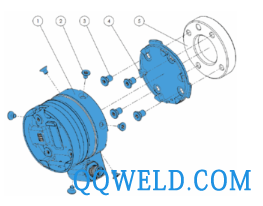
【06】转接板B—机器人套件105866
使用5 Nm的拧紧力矩:
1、M5x12螺钉(ISO14580 A4-70)
2、OnRobot适配器法兰-B(ISO 9409-1-50-4-M6)
3、定位销Ø5x6(ISO2338 h8)
4、机械手工具法兰(ISO 9409-1-31.5-4-M5)
以上适用于以下带通信接口法兰的VS-050、VS-060或带标准法兰的VS-050-S2(洁净室类型)的机器人型号
【07】转接板C—机器人套件105867
使用10 Nm的拧紧力矩:
1、M6x8螺钉(ISO14580 A4-70)
2、OnRobot适配器法兰-C(ISO 9409-1-50-4-M6)
3、定位销Ø6x14(ISO2338 h8)
4、机械手工具法兰(ISO 9409-1-31.5-4-M5)
以上适用于以下机器人型号:VM-6083, VM-60B1
【08】快速更换器-机器人部分
使用10 Nm的拧紧力矩:
1、M6x8螺钉(ISO14580 A4-70)
2、OnRobot适配器法兰(ISO 9409-1-50-4-M6)
3、定位销Ø6x10(ISO2338 h8)
4、机械手工具法兰(ISO 9409-1-31.5-4-M5)
【09】双快速更换器-机器人部分
使用5Nm的拧紧力矩:
1、M6x20mm(ISO14580 8.8)
2、双快速转换器
3、定位销Ø6x10(ISO2338 h8)
4、适配器/机械手工具法兰(ISO 9409-1-50-4-M6)
【10】HEX-E/H QC
对于M4x6mm,使用1.5 Nm的拧紧力矩。
对于M6x8mm,使用最大3.8 Nm的拧紧力矩。
1、HEX-E/H质量控制传感器
2、M4x6mm(ISO14581 A4-70)
3、M6x8mm(NCN20146 A4-70)
4、HEX-E/H QC适配器
【11】安装与设置

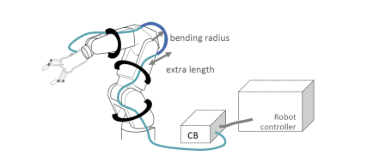
【12】连接以太网/IP配置
需要连接三根电缆才能正确连接系统:
1、刀具和计算箱之间的刀具数据电缆
2、机器人控制器和计算箱之间的以太网通信电缆
3、计算箱电源
【13】连接数字I/O配置
必须连接四种电缆才能正确连接系统:
1、刀具和计算箱之间的刀具数据电缆
2、计算机箱和机器人控制器之间提供的数字I/O线
3、计算箱和计算机之间的以太网通信电缆(安装程序)
4、计算箱电源
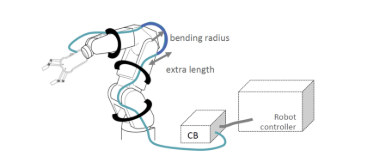
注意:
1、将数据线连接到工具上,然后将电缆(蓝线)布线到计算箱(CB)上,并使用提供的尼龙搭扣胶带(黑色)将其固定。
2、确保在布线过程中,在接头处使用额外的长度,以便机器人移动时电缆不会被拉动。
软件基础设置
【01】电装机器人软件版本
机器人软件版本:
2.9.1版
以太网/IP包:
有关以下事项,请联系当地DENSO:
以太网/IP适配器板(410010-708或410010-709)
离线编程工具:
WINCAPS III型
请联系DENSO下载
【02】支持DENSO的控制器

RC8A控制器
将RJ/45电缆连接到控制器
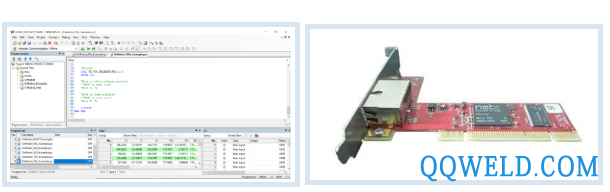
【03】软件设置1–以太网/IP
安装以太网/IP软件包的关键步骤-示例
1、在笔记本电脑上安装DENSO WINCAPS III
2、将计算箱设置为扫描仪
3、将机器人设置为适配器
4、将OnRobot函数加载到Robot
5、使用可用功能对机器人产品进行操作
【04】VGC10快速操作实例代码
1、通过添加主模块启
2、添加航路点
3、通过键入以下代码打开夹持器:
OR_VGX_GRIP (instance, channel A, channel B, wait)
instance: 1 for primary, 2 for secondary tool setup
Channel A: the desired vacuum level
Channel B: the desired vacuum level
wait: wait for the gripper action before proceeding to next node
1、启动新程序
2、添加调用或初始化()
3、添加起始位置
4、添加拾取位置
5、添加预拾取位置
6、通过键入OR_VGX_Grip (1,30,30,1)来夹持零件
7、返回预选位置
8、定位位置
9、添加OR_VGX_Release (1,1,1) 命令以打开夹持器
10、按工具栏上的“Connect”,然后将程序传输到机器人

【05】双重配置设置
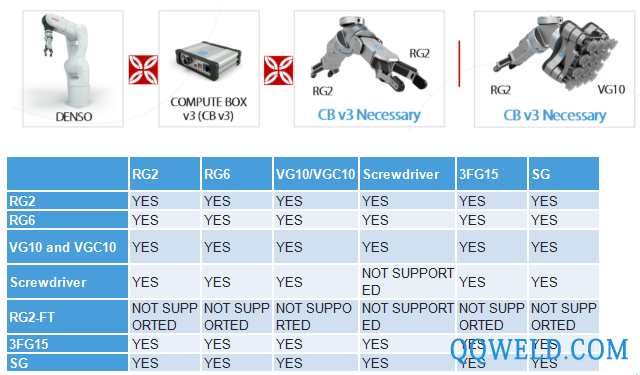
【06】快换器和双速换器

END
关注“OnRobot”微信公众号,我们将第一时间为您带来最新产品、企业新闻、展会报道等实用信息,更有OnRobot微官网,让您一键访问,轻松获取想要的信息!

 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 供应青岛铭信德管法兰焊接专用焊接变位机
供应青岛铭信德管法兰焊接专用焊接变位机 供应越达双立柱变位机
供应越达双立柱变位机 ,华荣WS-250 逆变直流氩弧焊机 不锈钢家用便携式焊机 电弧稳定
,华荣WS-250 逆变直流氩弧焊机 不锈钢家用便携式焊机 电弧稳定 山东路腾盖梁钢筋骨架焊接机器人 全自动焊接机器人 焊接机器人
山东路腾盖梁钢筋骨架焊接机器人 全自动焊接机器人 焊接机器人 鑫旺惠达(在线咨询)_电焊机_家用小型电焊机
鑫旺惠达(在线咨询)_电焊机_家用小型电焊机 聚英环保丨中央式滤筒除尘器分体集尘器金属钣金加工烟尘治理设备
聚英环保丨中央式滤筒除尘器分体集尘器金属钣金加工烟尘治理设备 上海冷却水泵变频 上海氩弧焊机冷却水泵 定子冷却水泵 星拾
上海冷却水泵变频 上海氩弧焊机冷却水泵 定子冷却水泵 星拾 焊机焊接机器人焊接机械手 自动焊接机器人 杉本直销
焊机焊接机器人焊接机械手 自动焊接机器人 杉本直销








