
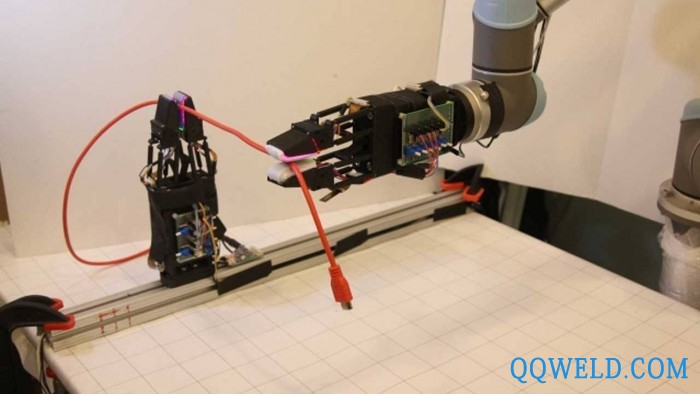
 抓手安装在机械臂上,机械臂作为控制系统的一部分,能够移动。GelSight传感器用于估计手指间电缆的位置,并测量电缆滑动的摩擦力。该系统具有双控制器,并行运行,其中一个控制器可调节抓握力度,另一个控制器可调整抓手位置,以保持电缆被牢牢抓住。 该抓手能够可靠地从随机的抓握位置开始跟踪USB电缆,并与第二个抓手结合,能够像人一样 "手把手 "地移动电缆,找到电缆的末端。该抓手还能够适应不同材质和厚度的线缆。机器人能够完成人类将耳塞插入手机时的常规动作。机器人从自由浮动的耳塞线缆开始,当感觉到插头接触到手指时,能够滑动线缆双指停止,并调整插头将插头插入插孔。
抓手安装在机械臂上,机械臂作为控制系统的一部分,能够移动。GelSight传感器用于估计手指间电缆的位置,并测量电缆滑动的摩擦力。该系统具有双控制器,并行运行,其中一个控制器可调节抓握力度,另一个控制器可调整抓手位置,以保持电缆被牢牢抓住。 该抓手能够可靠地从随机的抓握位置开始跟踪USB电缆,并与第二个抓手结合,能够像人一样 "手把手 "地移动电缆,找到电缆的末端。该抓手还能够适应不同材质和厚度的线缆。机器人能够完成人类将耳塞插入手机时的常规动作。机器人从自由浮动的耳塞线缆开始,当感觉到插头接触到手指时,能够滑动线缆双指停止,并调整插头将插头插入插孔。 对人类来说,最具挑战性的东西之一是绳子、电线或电缆等物品。这些薄而灵活的物体对于机器人来说更是难以驾驭,大多数机器人抓手根本无法处理它们。麻省理工学院的研究人员现在已经创造出了一种机器人抓手,能够更近距离地模仿人类处理这类柔性物体的方式。 该系统使用一对带有高分辨率触觉传感器的软性机器人抓手,来操纵自由移动的电缆。该团队打造了一个双指夹持器,它重量轻、移动快,可以实时调整力道和位置。在每个抓手的顶端都有一个基于视觉的(GelSight)传感器,该传感器由软橡胶制成,并嵌入了摄像头。
抓手安装在机械臂上,机械臂作为控制系统的一部分,能够移动。GelSight传感器用于估计手指间电缆的位置,并测量电缆滑动的摩擦力。该系统具有双控制器,并行运行,其中一个控制器可调节抓握力度,另一个控制器可调整抓手位置,以保持电缆被牢牢抓住。 该抓手能够可靠地从随机的抓握位置开始跟踪USB电缆,并与第二个抓手结合,能够像人一样 "手把手 "地移动电缆,找到电缆的末端。该抓手还能够适应不同材质和厚度的线缆。机器人能够完成人类将耳塞插入手机时的常规动作。机器人从自由浮动的耳塞线缆开始,当感觉到插头接触到手指时,能够滑动线缆双指停止,并调整插头将插头插入插孔。
抓手安装在机械臂上,机械臂作为控制系统的一部分,能够移动。GelSight传感器用于估计手指间电缆的位置,并测量电缆滑动的摩擦力。该系统具有双控制器,并行运行,其中一个控制器可调节抓握力度,另一个控制器可调整抓手位置,以保持电缆被牢牢抓住。 该抓手能够可靠地从随机的抓握位置开始跟踪USB电缆,并与第二个抓手结合,能够像人一样 "手把手 "地移动电缆,找到电缆的末端。该抓手还能够适应不同材质和厚度的线缆。机器人能够完成人类将耳塞插入手机时的常规动作。机器人从自由浮动的耳塞线缆开始,当感觉到插头接触到手指时,能够滑动线缆双指停止,并调整插头将插头插入插孔。 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 WSE-315LD/315MD/500HD 逆变式交直流 氩弧焊机 脉冲氩弧焊机 氩弧焊机 直流氩弧焊机
WSE-315LD/315MD/500HD 逆变式交直流 氩弧焊机 脉冲氩弧焊机 氩弧焊机 直流氩弧焊机 ZX7-315S 220V/380V双电压直流逆变电焊机IGBT家用工业两用焊机
ZX7-315S 220V/380V双电压直流逆变电焊机IGBT家用工业两用焊机 直销焊接机器人 冲压自动化 变位器 工装夹具
直销焊接机器人 冲压自动化 变位器 工装夹具 Panasonic/松下电弧焊机,松下全数字气保焊机,松下数字逆变气保焊机,松下不锈钢气保焊机YD-350GR3
Panasonic/松下电弧焊机,松下全数字气保焊机,松下数字逆变气保焊机,松下不锈钢气保焊机YD-350GR3 厂家供应气保焊机 逆变式气体保护焊机 NB-350/500MK 二保焊机
厂家供应气保焊机 逆变式气体保护焊机 NB-350/500MK 二保焊机 高速激光金属切割机 不锈钢激光切割机 管材激光切割机 数控激光切割机
高速激光金属切割机 不锈钢激光切割机 管材激光切割机 数控激光切割机 河北供应:ZHB-01 焊接变位机 焊接变位机 质量数
河北供应:ZHB-01 焊接变位机 焊接变位机 质量数 逆变直流220v 家用 电焊机 中坚焊机直销ZX7-250T
逆变直流220v 家用 电焊机 中坚焊机直销ZX7-250T








