
工信部发布的《“十四五”机器人产业发展规划》,提到重点研制AGV、无人叉车、分拣、包装等移动机器人,提高移动机器人的智能化水平,促进巡逻检查、定位导航、消防救援等公共服务机器人的创新应用。
对于移动机器人来说,重中之重的智能化评判标准为定位导航——SLAM(simultaneous localization and mapping),即时定位与地图构建,或并发建图与定位。
现有的导航定位算法是基于预先建好的地图进行定位,然而移动机器人的工作环境不是一成不变的,例如商场环境,随着时间的推移,店铺以及柜台都会发生变化,并且会增加一些活动场景,都会大幅度改变现有的移动机器人工作环境,从而使得移动机器人无法正常稳定执行工作。


正是为了应对动态环境没有成熟、稳定的解决方案这一现状,集萃智造整合传统SLAM技术与领先算法,提出了全新的动态建图技术方案,能完成动态环境下的定位建图能力,并完整地考虑、覆盖了机器人导航应用需求及功能。
尤其在商业环境下,针对其动态环境的高频变化,新技术能够动态地对环境特征进行分析与特征提取,构建完善的动态实时分析机制,并较好提高识别准确率,完成任务的同时,可以更高效动态更新环境地图。

能够自主导航,高精度定位的集萃智造清洁机器人
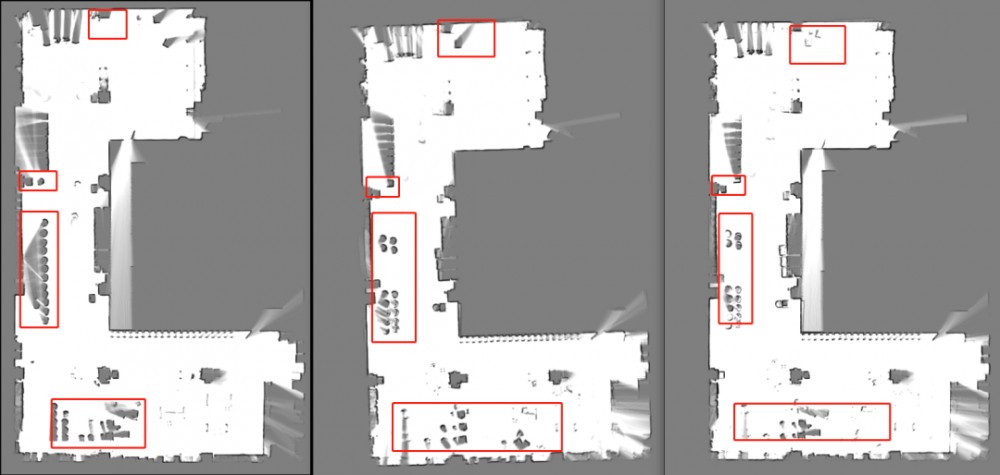
集萃智造动态建图实时更新
该技术主要是基于机器人原始全局定位地图,通过利用机器人运行时的激光雷达感知周围环境中的障碍物,得到激光数据,形成实时子地图;然后将实时子地图与原始全局定位地图对应的全局子地图进行匹配,更新当前全局定位地图。

►领先的环境感知系统——多传感器数据融合算法
集萃智造自主研发的移动机器人系列也是基于惯导传感器(IMU),激编码器(encoder),光雷达,视觉里程计等多种传感器融合算法核心技术,能够实现高精准定位,确保运行安全性。
导航采用全局路径规划与局部路径规划并行操作,实现安全可靠的运行。激光、视觉、超声、防碰撞、防跌落、红外等多传感器数据的融合能力,能够实现对动态环境的精准感知,在精确性、场景分析、避障、建图面积以及成本方面提供完美方案。


►高精度动态建图,构建细节精密化
基于强大的环境感知和建图能力,集萃智造移动机器人可在大多数场景地点进行开机识别、全局定位,达到高精度的定位建图。


南京金鹰世界高精度建图,实时动态跟踪
►高效建图能力再进化,多种复杂场景通用
集萃智造移动机器人采用了多传感器融合技术,能够适应不同的环境,实现精准定位的同时,也可以选配搭载机器人电梯物联模块,能够自动乘梯,实现跨楼层服务作业等,满足了多楼层复杂环境的需求。

与传统的SLAM技术相比,集萃智造新技术实时性更高,能够快速响应环境变化,并及时更新地图。此外,该技术还采用了高效的算法,大大提高了地图的精度和稳定性。
该技术的应用范围广泛,可用于室内巡逻、清洁消毒、家庭服务、机器人配送、陪伴/看护等领域,为机器人的智能化和自主化提供了更加可靠和高效的技术支持。

因为这些场景下机器人自主移动通常会存在环境复杂、粒度细、无法使用GPS等困难,而集萃智造动态地图实时更新的关键技术可以有效地解决这些问题。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 济南开元 供应 焊接设备 焊接机器人 厂家直销 焊接机器人
济南开元 供应 焊接设备 焊接机器人 厂家直销 焊接机器人 OTC FD-B4 二手工业机器人 自动焊接机器人
OTC FD-B4 二手工业机器人 自动焊接机器人 宏山激光切割机 激光切割机 镭射切割机 百超激光
宏山激光切割机 激光切割机 镭射切割机 百超激光 三轴焊接抛光控制系统
三轴焊接抛光控制系统 焊条/PP耐酸碱耐高温无毒无味PP焊条/白色PP焊条/4*4*6MMPP焊条
焊条/PP耐酸碱耐高温无毒无味PP焊条/白色PP焊条/4*4*6MMPP焊条 直流电焊机,直流电焊机介绍,直流电焊机厂家直销
直流电焊机,直流电焊机介绍,直流电焊机厂家直销 耐酸泵是什么材质的?
耐酸泵是什么材质的? 上海戟戊焊接滚轮架
上海戟戊焊接滚轮架








