
1 上位机直接移动ABB机器人 介绍了通过PCSDK ,上位机获取当前机器人位置。
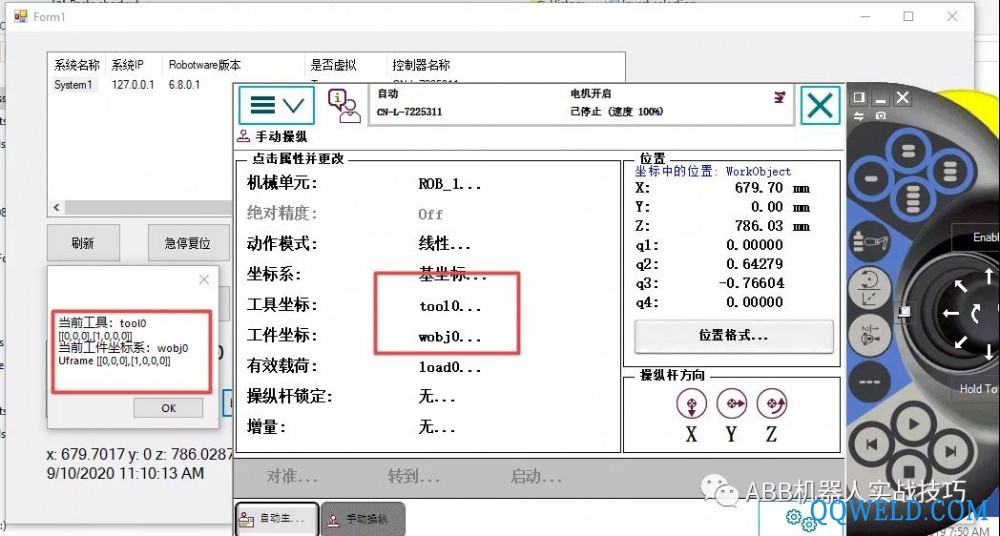
2. 如果希望获取当前使用的工具坐标和工件坐标名字和对应数据,任何实现?
3. 可以通过MechanicalUnit类中的Tool和Workobject属性获得

4. 要使用上述类,需要在代码中添加相关引用
using ABB.Robotics.Controllers.MotionDomain;
5. 创建对应代码如下:
Tool t = controller.MotionSystem.ActiveMechanicalUnit.Tool;
//获取当前工具
WorkObject w= controller.MotionSystem.ActiveMechanicalUnit.WorkObject;
//获取当前工件坐标系
ToolData t1 = (ToolData)t.Data;
//转化为ToolData
WobjData w1 = (WobjData)w.Data;
//转化为WobjData
string s1 = "";
s1 = "当前工具:"+t.Name+" ";
s1 = s1 + t1.Tframe.ToString() + " ";
s1 = s1+"当前工件坐标系:" + w.Name + " ";
s1 = s1 + "Uframe "+w1.Uframe.ToString() + " ";
MessageBox.Show(s1);
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 平顶山 ABB 钛自行车架焊接机器人
平顶山 ABB 钛自行车架焊接机器人 岳阳市 IRB 1600ID 焊接机器人 焊接机器人价格
岳阳市 IRB 1600ID 焊接机器人 焊接机器人价格 600A柴油发电电焊机 发电电焊机那家好
600A柴油发电电焊机 发电电焊机那家好 自动焊接机器人订购 河北深度自动化厂
自动焊接机器人订购 河北深度自动化厂 机器人焊接机 机器人点焊机 焊接机 焊机
机器人焊接机 机器人点焊机 焊接机 焊机 甘肃台式气保焊机河北仿激光焊机河北考虑的因素
甘肃台式气保焊机河北仿激光焊机河北考虑的因素 水冷500A气保焊柴油发电焊机
水冷500A气保焊柴油发电焊机 光纤激光切割机 工业光纤激光切割设备 光纤激光切割机厂家
光纤激光切割机 工业光纤激光切割设备 光纤激光切割机厂家








