
一.例子
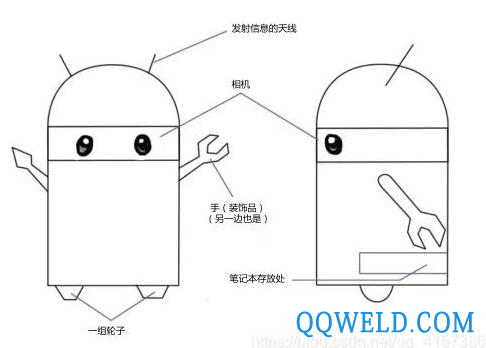
如上图的小萝卜机器人,要使其具有自主运动能力至少需要两个条件:
1. 我在什么地方?——定位。
2. 周围环境是什么样?——建图。
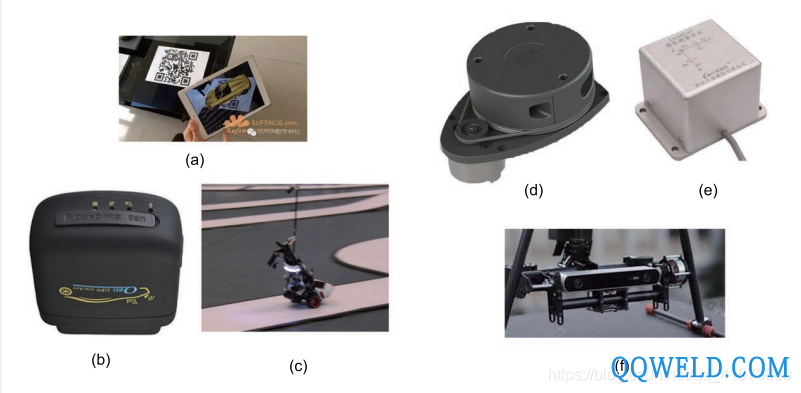
因此它既需要知道自身的状态-位置,也要了解所在的环境-地图。解决这些问题的方法非常多,如携带于机器人本体上的传感器,例如机器人的轮式编码器、相机、激光等等,另一类是安装于环境中的,例如导轨、二维码标志等等。
二.相机
在视觉SLAM中主要是用相机去解决定位与建图问题。按照相机的工作方式,把相机分为单目(Monocular)、双目(Stereo)和深度相机(RGB-D)三个大类,如下图所示。直观看来,单目相机只有一个摄像头,双目有两个,而 RGB-D 原理较复杂,除了能够采集到彩色图片之外,还能读出每个像素离相机的距离。它通常携带多个摄像头,工作原理和普通相机不尽相同。此外,SLAM 中还有全景相机 、Event 相机 等特殊或新兴的种类。

单目相机 :
只使用一个摄像头进行 SLAM 的做法称为单目 SLAM(Monocular SLAM)。这种传感器结构特别的简单、成本特别的低,所以单目 SLAM 非常受研究者关注,它的数据格式就是常见的照片。
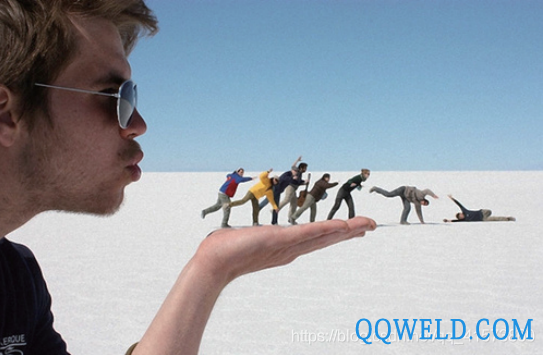
照片本质上是拍照时的场景(Scene),在相机的成像平面上留下的一个投影。它以二维的形式反映了三维的世界。显然,这个过程丢掉了场景的一个维度:也就是所谓的深度(或距离)。在单目相机中,我们无法通过单个图片来计算场景中物体离我们的距离(远近)——之后我们会看到,这个距离将是 SLAM 中非常关键的信息。由于我们人类见过大量的图像,养成了一种天生的直觉,对大部分场景都有一个直观的距离感(空间感),它帮助我们判断图像中物体的远近关系。比如说,我们能够辨认出图像中的物体,并且知道它们大致的大小;比如近处的物体会挡住远处的物体,而太阳、月亮等天体一般在很远的地方;再如物体受光照后会留下影子等等。这些信息可以都帮助我们判断物体的远近,但也存在一些情况,这个距离感会失效,这时我们无法判断物体的远近以及它们的真实大小。由于单目相机只是三维空间的二维投影,所以,如果我们真想恢复三维结构,必须移动相机的视角。
在单目 SLAM 中也是同样的原理。我们必须移动相机之后,才能估计它的运动(Motion),同时估计场景中物体的远近和大小,称之为结构(Structure)。如果相机往右移动,那么图像里的东西就会往左边移动——这就给我们推测运动带来了信息。另一方面,我们还知道近处的物体移动快,远处的物体则运动缓慢。于是,当相机移动时,这些物体在图像上的运动,形成了视差。通过视差,我们就能定量地判断哪些物体离得远,哪些物体离的近。
单目 SLAM 估计的轨迹和地图,将与真实的轨迹、地图,相差一个因子,也就是所谓的尺度(Scale)。由于单目 SLAM 无法仅凭图像确定这个真实尺度,所以又称为尺度不确定性。
单目相机数据
双目相机 (Stereo) 和深度相机 :
双目相机和深度相机的目的,在于通过某种手段测量物体离我们的距离,克服单目无法知道距离的缺点。如果知道了距离,场景的三维结构就可以通过单个图像恢复出来,也就消除了尺度不确定性。尽管都是为测量距离,但双目相机
与深度相机测量深度的原理是不一样的。双目相机由两个单目相机组成,但这两个相机之间的距离(称为基线(baseline))是已知的。我们通过这个基线来估计每个像素的空间位置——这和人眼非常相似。我们人类可以通过左右眼图像的差异,判断物体的远近,在计算机上也是同样的道理。如果对双目相机进行拓展,也可以搭建多目相机,不过本质上并没有什么不同。
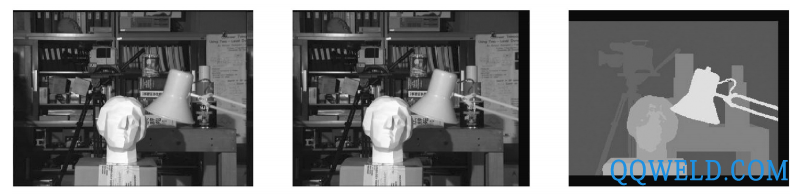
双目相机数据

深度相机数据
总结:
单目相机:以二维的形式反应了三维的世界,丢掉了深度,也就是物体到我们的距离。
双目相机:克服了单目相机的深度问题,通过已知两眼间的距离后大量计算。
深度相机(RGB-D):克服了深度问题。原理是通过激光传感器,通过主动向物体发射光并接收返回的光,测出物体离相机的距离,节省了大量计算,存在的问题是范围窄,视野小,易受日光干扰。
三.经典视觉SLAM框架
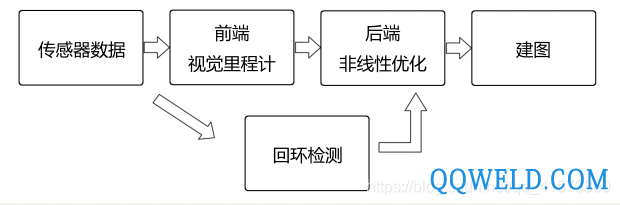
整个视觉 SLAM 流程分为以下几步:
1. 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
2. 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。VO 又称为前端(Front End)。
3. 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,又称为后端(Back End)。
4. 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。
5. 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。
四.SLAM问题的数学表述
假设小萝卜正携带着某种传感器在未知环境里运动,怎么用数学语言描述这件事呢?
首先,由于相机通常是在某些时刻采集数据的,所以我们也只关心这些时刻的位置和地图。这就把一段连续时间的运动变成了离散时刻 t = 1, . . . , K当中发生的事情。在这些时刻,用 X 表示小萝卜自身的位置。于是各时刻的位置就记为 X1, . . . ,Xk,它们构成了小萝卜的轨迹。地图方面,我们设地图是由许多个路标(Landmark)组成的,而每个时刻,传感器会测量到一部分路标点,得到它们的观测数据。不妨设路标点一共有 N个,用 Y1, . . . ,YN表示它们。在这样设定中,“小萝卜携带着传感器在环境中运动”,由如下两件事情描述:
1. 什么是运动?我们要考虑从 k -1 时刻到 k 时刻,小萝卜的位置 x 是如何变化的。
2. 什么是观测?假设小萝卜在 k时刻,于Xk处探测到了某一个路标Yj,我们要考虑这件事情是如何用数学语言来描述的。
通常,机器人会携带一个测量自身运动的传感器,比如说码盘或惯性传感器。这个传感器可以测量有关运动的读数,但不一定直接是位置之差,还可能是加速度、角速度等信息。然而,无论是什么传感器,我们都能使用一个通用的、抽象的数学模型:

这里uk是运动传感器的读数(有时也叫输入),wk为噪声。注意到,我们用一个一般函数 f 来描述这个过程,而不具体指明 f的作用方式。这使得整个函数可以指代任意的运动传感器,成为一个通用的方程,而不必限定于某个特殊的传感器上。我们把它称为运动方程。与运动方程相对应,还有一个观测方程。观测方程描述的是,当小萝卜在 xk位置上看到某个路标点yj,产生了一个观测数据 zk,j。同样,我们用一个抽象的函数h 来描述这个关系:

这两个方程描述了最基本的 SLAM 问题:当我们知道运动测量的读数u,以及传感器的读数 z 时,如何求解定位问题(估计 x)和建图问题(估计 y)?这时,我们把 SLAM问题建模成了一个状态估计问题:如何通过带有噪声的测量数据,估计内部的、隐藏着的状态变量。
状态估计问题的求解,与两个方程的具体形式,以及噪声服从哪种分布有关。按照运动和观测方程是否为线性,噪声是否服从高斯分布进行分类,分为线性非线性和高 斯非高斯系统。其中线性高斯系统(Linear Gaussian, LG 系统)是最简单的,它的无偏的最优估计可以由卡尔曼滤波器(Kalman Filter, KF)给出。而在复杂的非线性非高斯系统(Non-Linear Non-Gaussian,NLNG 系统)中,我们会使用以扩展卡尔曼滤波器(ExtendedKalman Filter, EKF)和非线性优化两大类方法去求解它。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 250米勒氩弧焊机、交直流焊机、铝焊机
250米勒氩弧焊机、交直流焊机、铝焊机 山东西恩西 自动焊接设备 焊接机器人 焊接机器人
山东西恩西 自动焊接设备 焊接机器人 焊接机器人 供应博塔重工牌 焊接滚轮架 供应焊接滚轮架
供应博塔重工牌 焊接滚轮架 供应焊接滚轮架 华荣WS-160 逆变直流氩弧焊机 便携式小型家用电焊机 电
华荣WS-160 逆变直流氩弧焊机 便携式小型家用电焊机 电 供应博塔重工BZT批量供应博塔重工自调滚轮架
供应博塔重工BZT批量供应博塔重工自调滚轮架 YP焊机ZX7200ZX7250WS-200 家用逆变手工,氩弧焊焊机
YP焊机ZX7200ZX7250WS-200 家用逆变手工,氩弧焊焊机 柴油发电电焊机190A电流
柴油发电电焊机190A电流 供应博塔重工 通用 特殊 焊接变位机 焊接变位机 数控切割机
供应博塔重工 通用 特殊 焊接变位机 焊接变位机 数控切割机








