
随着市场经济的不断发展,消费者的需求越来越趋于多样化,追求有别于他人(高级的、独特的、流行的)商品。新产品层出不穷,企业为了扩大市场占有率,必须适应市场的这种变化。因此,企业产品的多样化(也就是我们常说的多品种小批量的生产模式)就成了一种必然趋势。

为了应对这种新兴的生产模式,欧姆龙自动化提出「interactive 新型人机协作」,通过人与机械互相感知状况,在同一个生产现场通过互补、协助,实现超柔性生产。

2年前,从柔性搬运的自动化开始了人与机械的协作。在这两年间,我们确立了移动操纵机器人(Mobile manipulation)技术,从搬运,部品的抓取、供给、到组装,人与机械的协调作业范围变得越来越广。

如今,在这些技术之上,我们还加入了可追溯、检测非标作业的系统。实现了装置与人相融合,共同生产的,柔性且智能化的单元生产线。在欧姆龙草津工厂,人擅长的作业与机械擅长的作业有明确的分工,把多品种小批量生产的效率提高了200%以上。
在本届中国国际工业博览会(下称“工博会”)欧姆龙展台上,我们也将这套「人机协作的智能化单元生产线」带到了现场,下面就为大家详细拆解其中的各个展示部分以及核心价值。
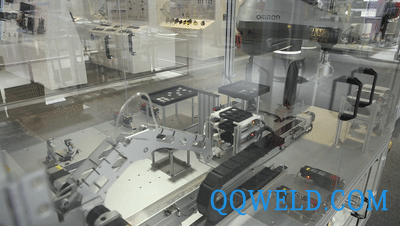
1、人机协作的智能化单元生产线
「人机协作的智能化单元生产线」是一套融合了AI、IoT、移动操纵机器人(MoMA)、协作机器人等欧姆龙独有的先进技术,基于大数据分析,实际运用在欧姆龙自社工厂的近未来生产管理系统。
部品搬运自动化
First Step:
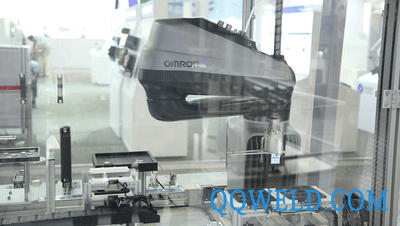
整合了移动机器人和协作机器人的“移动操纵机器人(MoMA)” 使部品架与作业工序之间的部品搬运完全实现自动化,
-- 移动至部品架 --

-- 抓取料盒 --
Second Step:
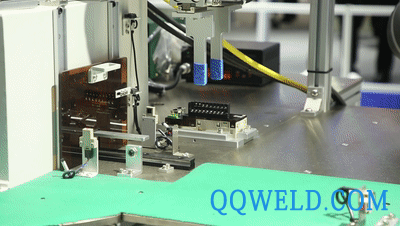
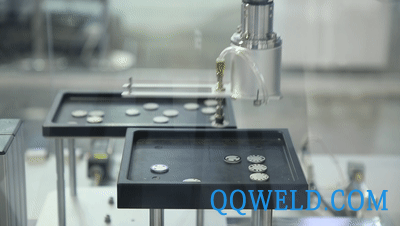
“移动操纵机器人(MoMA)” 内置图像识别系统,能够准确拾取料盒,并将其快速地搬送至下一道工序。

-- 视觉识别抓取料盒 --

-- 搬送至后道工序 --

-- 运送物料 --
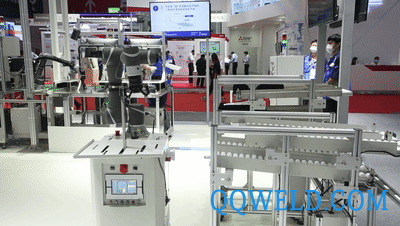
人机协作
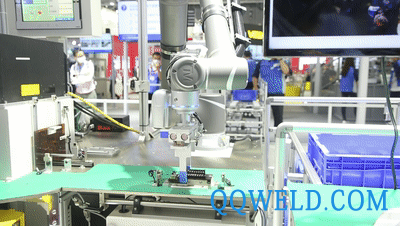
组装和检测工序的作业则由人与协作机器人分担完成, 同时确保安全的社交距离, 提供安心的生产现场环境。

-- 由人工负责第一道拧螺丝工序 --

-- 机器人将物料搬运至第二道工序 --

-- 机器人进行第二道拧螺丝工序 --
-- 完成后搬送至打标工序 --
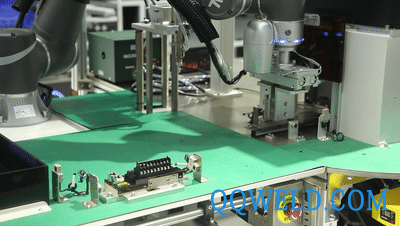
机器人之间的协作
打标、外观检查、下料与搬送,全部由协作机器人与移动操纵机器人(MoMA)之间配合完成,实现高度自动化生产。

-- 将打标完成的物料取出 --
-- 送至传感器进行外观检测 --
-- 良品确认后完成装盒 --
-- 移动机器人无缝取走料盒 --

-- 再搬运至货架上 --
通过智能化革新IE流程
通过5个色块分别显示5道工序的作业状态,监测作业人员的移动以及每道工序的停留时间,来判断作业是否正确,是否有待机时间等。
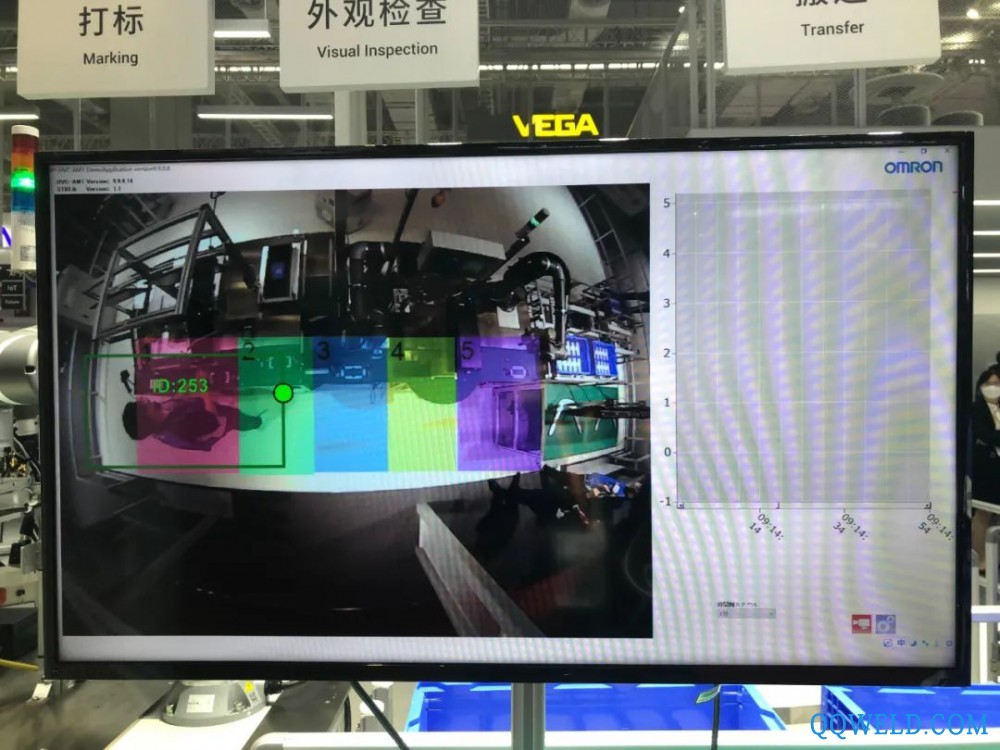
通过每道工序的加工时间、生产数量和累计完成数量、每道工序加工时间的差异可视化管理,谁都能一眼就看出作业偏差等问题,非熟练IE改善师也可以自行进行改善工作。
生产线的信息化不仅仅可以使人工作业和动作可视化, 也有助于解决生产现场的人员课题(例如, 培训工人熟练掌握技能等)。
2、设备·Robot·安全·图像的统合控制
当前的制造业,由于新冠疫情的影响,以往生产劳动力资源匮乏的社会问题变得更加严重。与迄今为止一直致力于降低成本的自动化不同,如今需要从保护员工人身安全角度出发,尽可能减少生产对人工的依赖性,所以对机器人导入这样的省人化需求将不断高涨。
▲ 但是,在导入机器人的过程中,大家是不是碰到过如下这些课题:
1、自动化生产很难做到像手工作业那么灵活
2、生产性的提高,需要通过设备与设备间的协调最优化。
3、经常在导入机器人后才发现问题,能够最优化工程设计的人才非常稀缺
4、以及如今“后疫情“时代背景下,为防止传染而限制人员流动、保持安全的社交距离这类对新型生产方式的需求
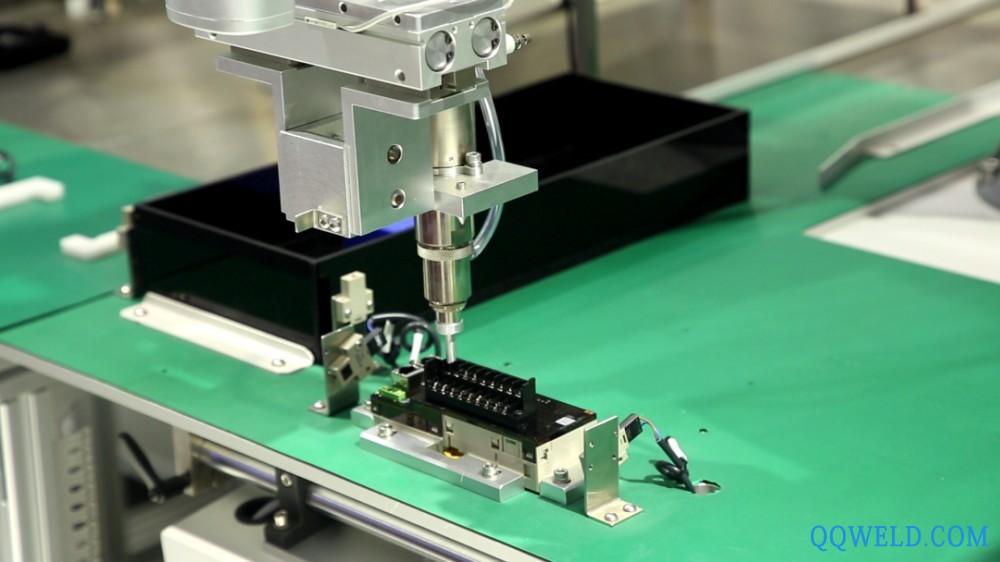
统合控制,完美同步
实现高端手工作业的自动化和提高机械产能的关键在于把,以往零散的input设备,逻辑控制器,output,机器人和安全,统合起来由一个控制器进行控制。我们把这个叫做“控制的统合”。

-- 由SCARA搬送料盘 --
-- 将料盘上的工件Pick&Place --

-- 通过同步控制图像传感器 --
-- 对工件进行分拣 --
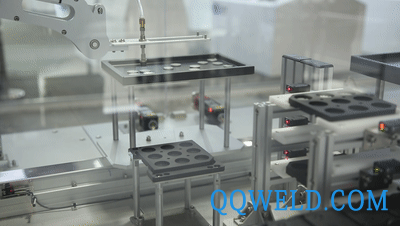
-- 将分拣完成的工件装入料盘 --

-- 再将料盘搬送至部品架 --
当中涉及到的机器人(SCARA)、图像(图像传感器)、安全(安全门开关)、设备(传送皮带等)全部通过一个控制器来进行统合控制,这样包括机器人在内的所有设备都可以完美同步和高度自动化,不会出现任何轻微的时间或速度的偏差。
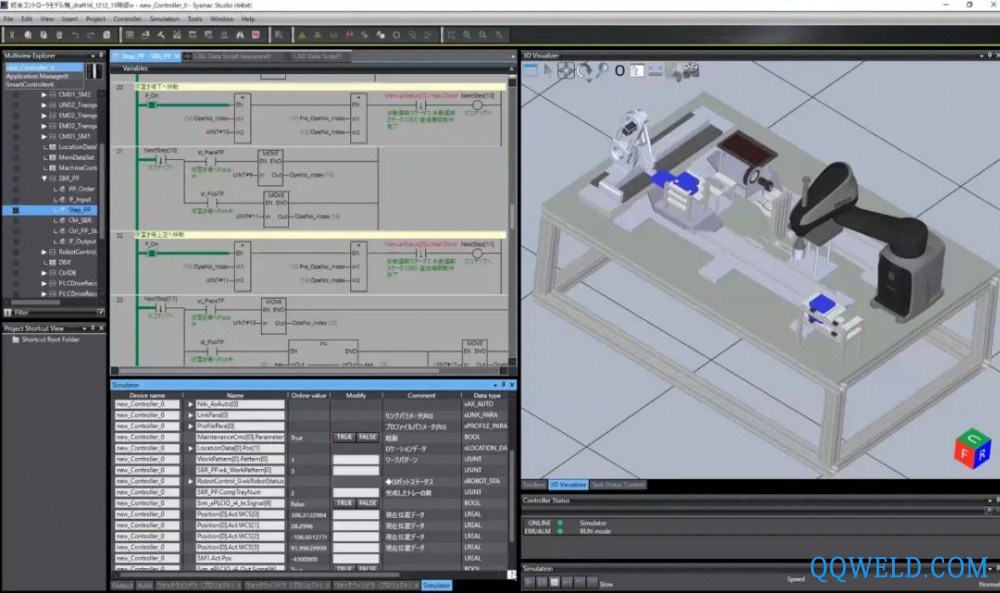
构建过程的统合,实现远程模拟
之所以能实现了Engineering Chain的革新和虚拟生产制作,是因为我们通过一个软件来“构建过程的统合”。
这个价值主要是针对集成商、设备制作商、生产技术工程师等自动化设备构建方的。把生产设备构成中必需要的众多的控制器用一个软件进行统合,简单就可以实现控制器和机器人的完美磨合。
甚至,将CAD数据导入到这个软件中进行模拟,可以在同一个软件中获得包括机器人在内的设备信息。通过对前后工序段的仿真,让导入前的工程设计等的事前验证成为可能,使EngineeringChain的工时削减50%。
通过活用工程模拟,以往不导入上线制作便不了解的情况,现在事前就可以估算出所有设备的效率、消除问题点、无需设计返工,让预测到未来的设备设计成为可能。无需停止设备,也可以离线验证和安排紧急的品种追加和工程追加。
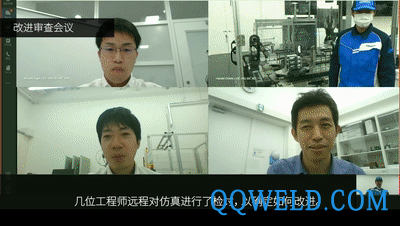

这样的话,像以往我们只有在现场才能确认的设备设计、生产设备稼动的模拟、以及状态监测,都可以在虚拟空间进行再现,让远距离生产制造成为可能。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 供应博塔焊接堆焊专机 滚轮架 自调滚轮架
供应博塔焊接堆焊专机 滚轮架 自调滚轮架 直销MIG-500小型焊机 380V/三相双脉冲弧焊机 家用电焊机
直销MIG-500小型焊机 380V/三相双脉冲弧焊机 家用电焊机 上海东升WSME-315/400交直流氩弧焊机铝焊机脉冲水冷氩弧焊WSE250
上海东升WSME-315/400交直流氩弧焊机铝焊机脉冲水冷氩弧焊WSE250 供应三社氩弧焊机ID-2001TP
供应三社氩弧焊机ID-2001TP 耐热焊条焊接 焊条质量 耐磨合金堆焊焊条 量大从优
耐热焊条焊接 焊条质量 耐磨合金堆焊焊条 量大从优 搪玻璃冷凝器检修要做好哪些准备
搪玻璃冷凝器检修要做好哪些准备 WS7-500(IGBT)氩弧焊机直流焊机供应
WS7-500(IGBT)氩弧焊机直流焊机供应 ZT 焊接滚轮架 ZT 焊接滚轮架 沧州辉腾管道装备
ZT 焊接滚轮架 ZT 焊接滚轮架 沧州辉腾管道装备








