
6.4 安装机器人
6.4.1 底座
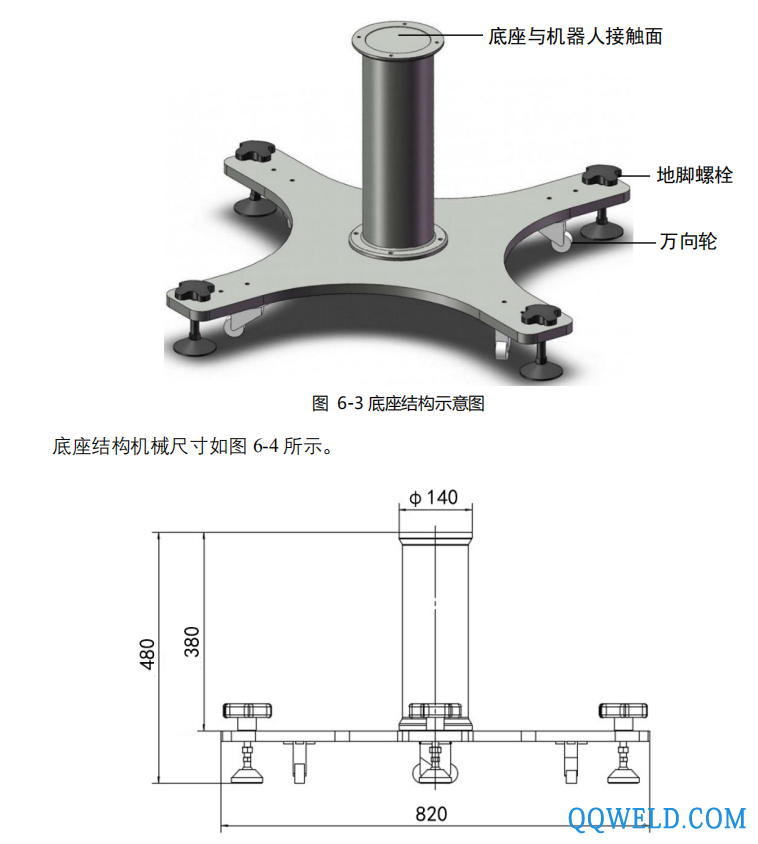
AUBO-i3 底座如下图所示。
底座带有 4 个地脚螺栓和 4 个万向轮,方便固定和移动。用户需要固定机器人本体时,旋转地脚螺栓上部,降下地脚螺栓;要移动机器人本体时,用工具(扳手)旋转地脚螺栓下部螺母,升高地脚螺栓使底座万向轮着地即可。

6.4.2 安装机器人本体
机器人具备 360°安装位置姿态自适应功能,可支持在底座上安装、吊装、壁装及其他特定安装方式,如图所示。

图 6-5 不同安装姿态示意图
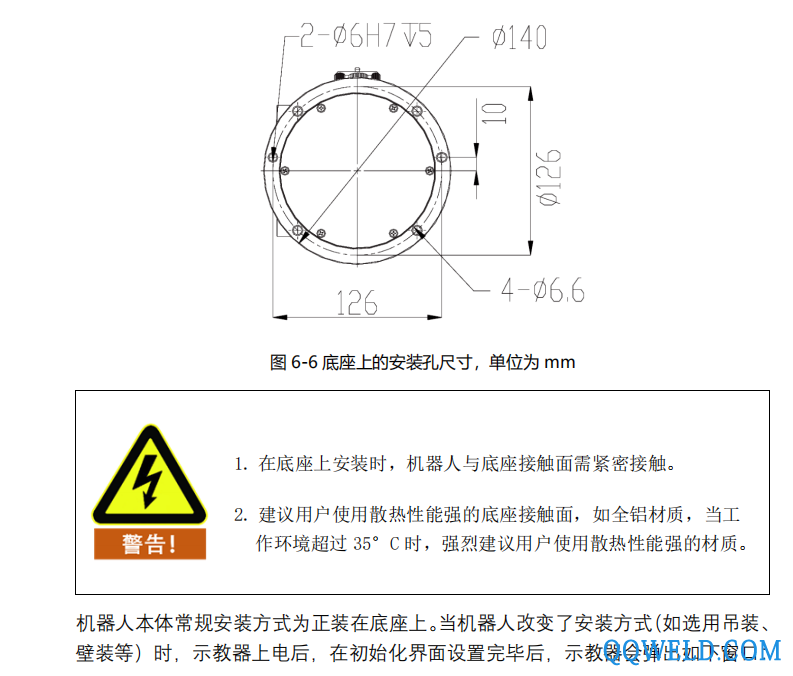
在底座上安装时,使用 4 颗 M6 螺栓将机器人本体固定在底座上,建议使用两个Ф6mm 的孔用来安装销钉,以提高安装精度,机械尺寸如图 6-6 所示。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 jasic/佳士电焊机无气 家用 NB-200士电焊机无气自保护焊
jasic/佳士电焊机无气 家用 NB-200士电焊机无气自保护焊 润煤R激光切割机,激光切割机性能,激光切割机厂家
润煤R激光切割机,激光切割机性能,激光切割机厂家 供应罗尼威尔HGK喷砂滚轮架
供应罗尼威尔HGK喷砂滚轮架 【现货】东禾直销PVC焊条 PP焊条 耐酸 pvc焊条
【现货】东禾直销PVC焊条 PP焊条 耐酸 pvc焊条 聚英环保|一体式滤筒除尘器 工业粉尘除尘治理 单机滤筒除尘器
聚英环保|一体式滤筒除尘器 工业粉尘除尘治理 单机滤筒除尘器 供应迎喜商标UN-1 对焊机,铜丝对焊机,电缆厂家用对焊机
供应迎喜商标UN-1 对焊机,铜丝对焊机,电缆厂家用对焊机 UN对焊机 小型对焊机 微型对焊机家用
UN对焊机 小型对焊机 微型对焊机家用 ,华荣ZX7-160(MOS) 逆变直流手工焊机 高效节能 家用便携式焊机
,华荣ZX7-160(MOS) 逆变直流手工焊机 高效节能 家用便携式焊机








