
10.5.2 缩减模式
该模式被激活后,机械臂在关节空间中的运动速度将受到限制,相应文本框中的数值即为各关节运动速度的极限值,其中 1,2,3 关节的设定范围为 15~150°/s,4,5,6 关节的设定范围为 15~180°/s;机械臂在笛卡尔空间的运动速度极限即为 TCP速度限制值,设定范围为 160~2800mm/s。
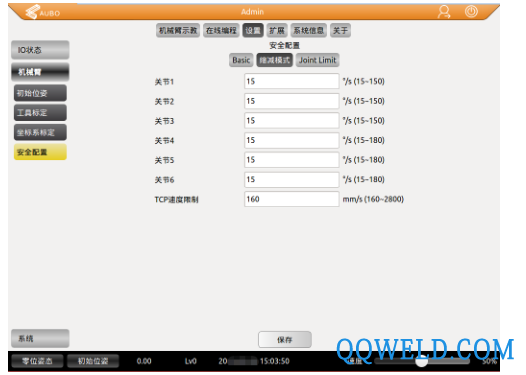
图 10-49
10.5.3 关节限制
该模式被激活后,机械臂各个关节的运动角度将受到限制,相应文本框中的数值即为各关节运动角度的极限值。超过设定的关节角度,机械臂不会运动并弹出警示信息,此时,如需移动机械臂,需采用拖动示教模式将机械臂运动到允许的关节角度范围内。

 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 成都华远薄板专用焊机 二保焊机 NB-250LB/315LB/250LT/315LT 气保焊机
成都华远薄板专用焊机 二保焊机 NB-250LB/315LB/250LT/315LT 气保焊机 供应河北辉腾CZ4040焊接操作机 焊接变位机 焊接滚轮架 焊接中心配置
供应河北辉腾CZ4040焊接操作机 焊接变位机 焊接滚轮架 焊接中心配置 河北辉腾ZT10焊接滚轮架 10吨自调式滚轮架价格优惠厂家直销
河北辉腾ZT10焊接滚轮架 10吨自调式滚轮架价格优惠厂家直销 山西机器人激光焊接机,振镜式激光焊接机,市场如何
山西机器人激光焊接机,振镜式激光焊接机,市场如何 诺博泰 单轴单头变位机 厂家直销 欢迎来电咨询
诺博泰 单轴单头变位机 厂家直销 欢迎来电咨询 RBT水平回转变位机SPT 焊接变位机
RBT水平回转变位机SPT 焊接变位机 柔性组合夹具 焊接机器人夹具 焊接夹具汽车 汽车焊接设备 机器人焊接工装 机器人焊接工装夹具 焊接设备及工装 工装设备
柔性组合夹具 焊接机器人夹具 焊接夹具汽车 汽车焊接设备 机器人焊接工装 机器人焊接工装夹具 焊接设备及工装 工装设备 日精机器人 焊接机器人
日精机器人 焊接机器人








