
11.7.3 离线命令Offline Record
Offline Record 命令可以将离线编程软件生成的轨迹文件嵌入到在线编程里

➢ 选中离线文件,点击确认保存。
➢ 界面下侧输入框可以设置机械臂运动到准备点时各个关节的速度及加速度。修改后请点击确认按钮。
➢ 导入的轨迹文件格式每行需包含六个关节角,且单位为弧度。
➢ 导入的轨迹文件后缀需以.offt 结尾。
➢ 导入文件需复制到文件加下方能在 AUBOPE 软件界面下显示,复制目录为如
下图所示:

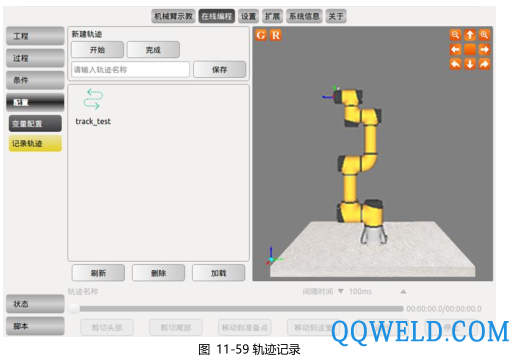
11.8 轨迹记录
记录轨迹可以实现在一段时间内对机械臂运动轨迹的记录,并应用到在线编程环境中。
新建轨迹:点击开始按钮后开始记录机械臂运动轨迹,点击完成按钮结束记录,在输入框中输入轨迹名称,点击保存后,完成轨迹记录。
轨迹回放:选中轨迹图标,点击界面中的加载,长按移动到准备点按钮,将机械臂移动至轨迹记录的初始位置,然后点击运行后,即可进行轨迹回放。
轨迹暂停:点击停止,会将回放中的机械臂暂停。
轨迹暂停后恢复:长按移动到准备点将机械臂同步到当前进度位姿后,点击运行,即可恢复轨迹回放。
间隔时间:轨迹记录时间单位为每个路点 100ms,间隔时间的含义是用多少时间播放这 100ms,例如将间隔时间设置为 50ms,则以 2 倍的速度播放轨迹,若设置为200ms,则以 0.5 倍的速度慢放。
轨迹回放时,会通过滑块及进度条显示轨迹进度,用户也可以手动拖动进度条,对轨迹进行操作。
点击剪切头部,即可删除滑块所在位置之前的轨迹,点击剪切尾部,即可删除滑块所在位置之后的轨迹。
轨迹记录的时间区间为 2″~5′。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 越达-厂家专业生产焊接辅机_焊接滚轮架 自调行走60吨滚轮架系列
越达-厂家专业生产焊接辅机_焊接滚轮架 自调行走60吨滚轮架系列 萧山和面机/萧山花环式和面机/萧山桨叶式和面机
萧山和面机/萧山花环式和面机/萧山桨叶式和面机 ABB 进口焊接机器人 IRB 140TW 舟山 打磨机器人
ABB 进口焊接机器人 IRB 140TW 舟山 打磨机器人 Yaskawa/安川 焊接机器人陕西
Yaskawa/安川 焊接机器人陕西 麦格米特铝焊机 电焊机 全数字工业重载直流 脉冲智能焊机
麦格米特铝焊机 电焊机 全数字工业重载直流 脉冲智能焊机 中国洛阳-博塔重工-重型不规则罐体-专用防窜动滚轮架
中国洛阳-博塔重工-重型不规则罐体-专用防窜动滚轮架 LGK-40逆变空气等离子电焊机 便携式 家用电焊机 逆变电焊机
LGK-40逆变空气等离子电焊机 便携式 家用电焊机 逆变电焊机 l批发热销供应多种 一体化电焊机
l批发热销供应多种 一体化电焊机








