
10.3 机器人 I/O 设置 及状态显示
机器人系统的电气 I/O(参见 8 电气接口)可以通过以下小结进行查看及设置。I/O
设置面板分为控制器 I/O 设置、用户 I/O 设置、工具端 I/O 设置。
10.3.1 控制器I/O
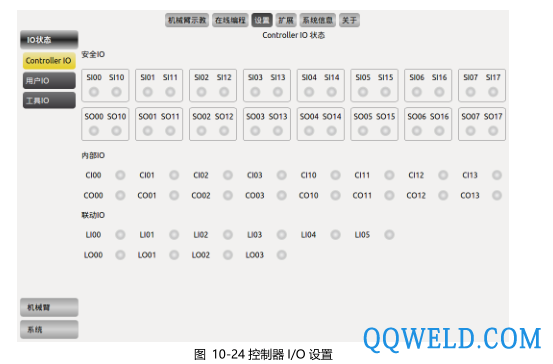
安全 I/O:所有的安全 I/O 都均为双通道,保持冗余配置可确保单一故障不会导致安全功能失效。(I/O 定义参见 8.5.3 安全 I/O 功能定义)内部 I/O:为内部功能接口,提供控制器内部接口板的 I/O 状态显示,不对用户开放。(I/O 定义参见 8.3)联动 I/O:机械臂可通过该 I/O 接口与外部一台或多台设备(机械臂等)通信,从而进行协同运动。(I/O 定义参见 7.4.2 联动模式)
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 六轴焊接机器人
六轴焊接机器人 焊接机器人 自动焊接管道 览众脉冲氩弧管道自动焊
焊接机器人 自动焊接管道 览众脉冲氩弧管道自动焊 码垛机器人 ABB爱科思机器人发那科Fanuc安川库卡KUKA焊接机器人焊接机械手焊接自动化汽车焊接汽车焊接自动化
码垛机器人 ABB爱科思机器人发那科Fanuc安川库卡KUKA焊接机器人焊接机械手焊接自动化汽车焊接汽车焊接自动化 林肯中天WSEM-315氩弧焊机 氩弧焊、电焊两用焊机 220V/380V 家用便携式焊机 厂家批发
林肯中天WSEM-315氩弧焊机 氩弧焊、电焊两用焊机 220V/380V 家用便携式焊机 厂家批发 400A柴油发电电焊机_大泽发电电焊机
400A柴油发电电焊机_大泽发电电焊机 厂家直销【贯通智维】激光切割机 激光切割机厂家 质量保证
厂家直销【贯通智维】激光切割机 激光切割机厂家 质量保证 脉冲氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机
脉冲氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机 沈阳YH1*95电焊机电缆
沈阳YH1*95电焊机电缆








