
12月2-4日,第六届广东国际机器人及智能装备博览会暨第二届中国(华南)国际机器人与自动化展览会如期在广东现代国际展览中心(东莞厚街)拉开的大幕!
作为机器人和各大自动化集成商的全球合作伙伴,ATI全系产品及三大系列机器人末端工具应用工作站重磅亮相,在机器人及工业领域的你,获得意想不到的收益。
12月2日- 12月4日,广东现代国际展览中心(东莞厚街),第二届中国(华南)国际机器人与自动化展览会。ATI展位 :3号馆B3100,欢迎您莅临参观~
力控拖拽示教工作站
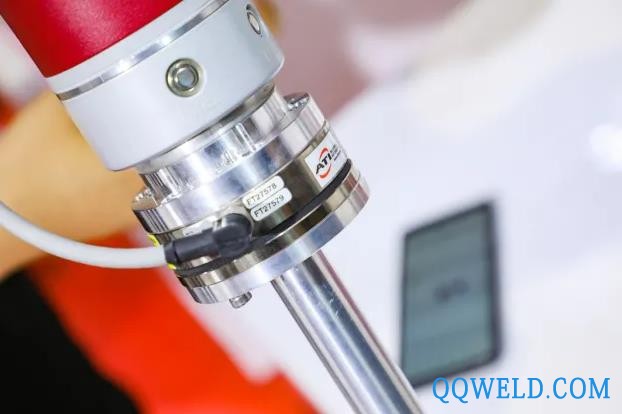
基于力传感器的协作机器人拖动示教,节卡协作机器人通过在末端搭载ATI六维力/力矩传感器,配合控制器中的算法,操作者牵引机器人末端执行器做线性或旋转运动时,可检测出用户施加在该处的外力信息(Fx、Fy、Fz、Tx、Ty、Tz),再结合导纳控制,即可实现机器人更加灵敏的拖动示教编程工作。
技术特点:1.能够精确地检测外力的大小,系统的灵敏度较高。2.由于有传感器作为外部绝对反馈,系统稳定性有更好的保证。
应用场景:1.传统行业领域,机器人借助于灵敏拖动示教的特点,可以大大简化编程工作量,实现快速编程,如喷涂行业。2.新型精密领域,机器人通过反馈的外力信息实时调整机械臂位姿,完成一些更加复杂的精密性作业,如3C电子装配、打磨、抛光等。
机器人材料去除工作站

在协作机器人蓬勃发展的今天,越来越多的应用被开发应用,我们最新产品AOV-10也新晋为UR+的新成员,此次展会,我们继续上海工博会,展示出协作机器人使用ATI最新偏心浮动振动砂光机进行曲面打磨。
合作客户:珞石机器人展位(3号馆B3011),力控装配工作站:基于ATI六维力/力矩传感器的减速器齿轮力控装配。配备力控技术的XB机器人可感知环境信息,并根据力矩传感器的数据修正机器人的路径和速度,极大拓展机器人的应用领域。

技术特点:1.简化编程,提升品质。自主研发的Titanite操作系统含有丰富的力控指令,简单的指令即可达到复杂精准的工艺控制。2.快速响应,保证精度。对外力反馈的响应时间可调,兼顾实时性和稳定性。3.多维控制,自由灵活。六个自由度力控参数可单独设置,实现不同运动方向的恒力接触。4.过载保护,安全可靠。一旦超出力监控范围,机器人将停止运动,防止机器人过载或损伤工件。
应用领域:需要机器人与工件之间保持恒定力/力矩且需精准控制其大小的领域,如减速器装配、变速箱装配、铸件去毛刺、打磨、编码器玻璃倒角、刀具开刃、产品测试等。
12月2日11:15-11:35。ATI中国区材料去除专家 张志军-ATI机器人打磨方案介绍
欢迎扫描二维码观看

 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 焊接机器人 安诺品牌源厂 四轴焊接型机械手 六轴上下料型机械臂
焊接机器人 安诺品牌源厂 四轴焊接型机械手 六轴上下料型机械臂 三门峡ABB IRB 14CR0不锈钢 焊接机器人 焊接机器人
三门峡ABB IRB 14CR0不锈钢 焊接机器人 焊接机器人 热卖新款OTC焊接机器人/工业机器人/全自动机器人
热卖新款OTC焊接机器人/工业机器人/全自动机器人 东禾 塑料焊条价格_pp pvc塑料焊条厂家_pp pvc塑料焊条颜色及批发
东禾 塑料焊条价格_pp pvc塑料焊条厂家_pp pvc塑料焊条颜色及批发 供应HB型全位置焊接变位机
供应HB型全位置焊接变位机 船王铝焊条铝合金焊条3.0
船王铝焊条铝合金焊条3.0 群福机电供应WS-200A WS-250A 直流氩弧焊机
群福机电供应WS-200A WS-250A 直流氩弧焊机 上海全自动焊锡机 全自动机器人自动焊接机送锡点焊机PCB板焊锡机
上海全自动焊锡机 全自动机器人自动焊接机送锡点焊机PCB板焊锡机








