
报告综述
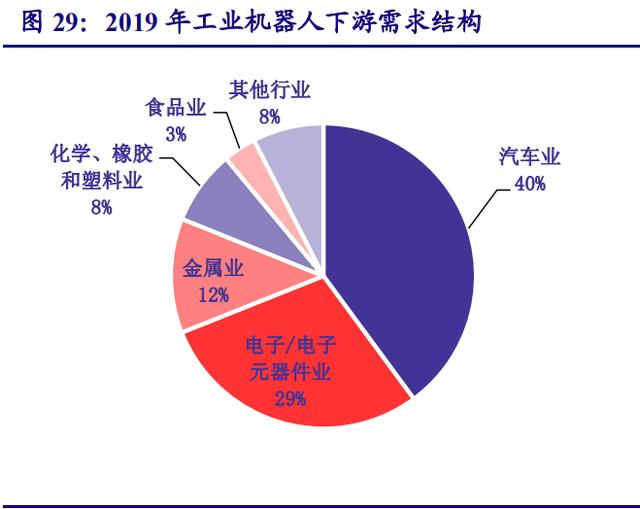
工业机器人汽车行业应用领域保持下游需求规模第一位。工业机器人下游应用广泛,主要应用行业包括汽车、电子电器、化学橡胶塑 料、金属制品、食品制造等行业。根据 IFR 统计,2019 年全球范围 内工业机器人在汽车和电子电气中的应用占比达 28.15%、23.59%, 合计占据工业机器人需求超过 50%。其中工业机器人在汽车行业中 的应用比例,受电子行业规模扩张,基数变大的影响略有下滑,但 汽车行业以其庞大的行业规模基础和较高的自动化率,我们预计汽车行业工业机器人下游需求规模仍将稳居高位。
20 世纪 90 年代美国汽车市场发起“2mm 工程”以应对日系车对市场份额的威胁。20 世纪 70 年代之前,美国三大车企福特、通用、克 莱斯勒常年占有美国汽车销售市场份额的 80%以上。两次石油危机 之后,日系车迅速抢占美国汽车市场,本田、丰田、日产共获得美 国汽车市场份额的 18.03%,日系车在美畅销的一大原因在于其车身 尺寸误差小,整车质量高、返修率低。为提高美国汽车品质以与日 系车抗衡,美国汽车行业开展了“2mm 工程”,该工程已成为系统性 工程并延续至今,其主要目标就是将白车身的综合误差指数提升至 日系车水平,从而提升汽车整车的质量,追回失去的市场份额。
“2mm”的尺寸偏差涉及多项工艺、涉及与操作等领域,工业机器人对产成品的精度影响仅占一小部分。空间工序上的误差累积、设备 磨损与误操作以及设计水平与装备水平等多方面都会对产成品造 成尺寸误差,美国汽车行业为提高汽车质量而发起的“2mm 工程”提 出应重点控制冲压件尺寸偏差、焊接变形、人工操作等因素,相较 之下,对零部件加工精度的要求是低于工业机器人可实现的重复定 位及加工精度范围,工业机器人加工产生的尺寸误差的仅为整个生产过程中尺寸误差链中的一环。
国产汽车机器人精度紧跟国外,或迎百亿市场空间。本文通过查阅公司官网与产品手册,以“2mm 工程”中工业机器人主要涉及的工序为分类基础,比较同等负载量级下国内外机器人精度与其他参数, 我们认为国产机器人在焊接、折弯等领域精度已经接近国外同类型产品。一方面,我国工业机器人行业明显呈回暖趋势,汽车行业边 际改善,汽车行业工业机器人的使用需求量存在提升空间。另一方面,我国国产工业机器人的渗透率仍有很大提升空间,跟随中国工 业机器人市场规模的扩大,并叠加国产工业机器人渗透率的提升, 我国国产工业机器人 2022 年预期对应的市场规模区间在 143.6~165.7 亿元,年均增速预计可达 30%以上。
一、回顾美国汽车行业的“2mm 工程”
20 世纪 90 年代,为应对日系汽车在美市场份额扩大的挑战,美国汽车行业开展了“2mm 工程”,取得了良好的成果。美国是车轮上的国家,汽车工业是美国制造业的支柱产业,机动车产出占制造业行业增加值的 15%~25%。在 20 世纪 70 年代之前,美国三大汽车公司市场占有率总和高于 80%。
20 世纪 70 年代开始,日系车进入美国市场,市场份额快速上升,迅速抢夺了美国汽车市场约 20%的份额。日系车在美畅销,除了制定了正确的营销策略顺应了石油危机的影响和 迎合了消费者的需求外,其主要原因在于日系汽车的质量明显高于车身精度较低、尺寸偏差 较大的美国汽车。为了应对市场份额流失,20 世纪 90 年代,美国汽车行业发起了旨在提高 汽车质量、降低车身误差、挽回市场份额的“2mm 工程”。在“2mm 工程”开展的 3 年 (1992-1995),美国汽车质量明显提高,工程取得良好成果。
(1)美国汽车工业成熟发达,千人汽车保有量世界第一
美国被称为“车轮上的国家”,汽车工业成熟且发达。美国密集的公路是人流、物流的 重要运输命脉,同时也促使了美国汽车行业的崛起。美国汽车产业自 20 世纪以来发展至今, 已经经历了完整的起步、成长、成熟阶段。 汽车制造业是美国制造业的支柱,机动车产出占制造业行业增加值常年稳定在 15%~25% 的区间,对维持制造业产出起到了重要的作用。同时,美国汽车的总保有量与人均保有量也 长期稳居世界第一,根据世界银行 2019 年公布的数据,美国每千人汽车保有量 837 辆,几 乎人均配有一辆汽车。
(2)90 年代高质量日系车抢占市场,美国“2mm 工程”应运而生
20 世纪 70 年代日系汽车大举进军美国市场,严重侵蚀美国市场份额。
20 世纪 70 年代 之前,美国三大车企福特、通用、克莱斯勒常年占有美国汽车销售市场份额的 80%以上,而 日系汽车在美市场占有率几乎为 0。 两次石油危机之后(1973-1974 年、1979-1980 年),低油耗、高质量的日系汽车迅速抢 占美国汽车市场,本田、丰田和日产于 1990 年共获得了 18.03%的美国汽车销售市场份额, 而与之相对的则是美国车企市场份额的迅速下降,福特、通用、克莱斯勒的市场份额之和从 1965 年的最高值 90.60%下降至 1990 年的 70.96%,失去了近 20%的市场份额。这对美国汽 车制造业产生巨大冲击,并在相当程度上影响了美国整个国民经济的发展。
20 世纪 90 年代,为提高美国汽车质量使之能与日系汽车抗衡,美国汽车行业开展了 “2mm 工程”。日系汽车之所以能迅速获得美国汽车市场份额,除了其价格低、油耗低的特点之外,还有一个重要的原因就是质量高。20 世纪 80 年代末,日本依靠全面质量管理(TQC) 使其品牌产品的车身制造综合偏差控制在 2mm 以内,为日本轿车产品全面占领欧美市场奠 定了基础。
1991 年,美国密西根大学(University of Michigan)吴贤明教授提出了命名为“2mm 工 程”的计划构想,从系统的观点出发对汽车产品采用车身制造综合误差指数(continuous improvement indicator),即“6σ”来控制车身制造质量,从而得以用最经济的制造成本提 高汽车产品的整体质量。当时,日本汽车白车身(即不包括附件及装饰件的未涂漆的车身) 尺寸误差综合指数控制在 2mm 以内,欧洲汽车控制在 2.5~3mm 以内,而美国汽车仅某些车 型控制在 4mm 以内,部分车型误差值高达 5~6mm。
白车身通常是指尚未装配门盖和发动机罩的未涂装的车身基本骨架,轿车白车身通常由 前围、后围、左右侧围、车顶、底板等几大部分组成,在轿车车身生产中,白车身的装配质 量很大程度上影响到最终整车性能,车身的精度也直接影响到整车的外观、使用性能和其商 品价值。1美国汽车车身尺寸误差较大,直接影响了美国汽车的质量,降低了美国汽车的竞 争力。
汽车白车身精度的控制涉及冲压工艺分析、冲模结构的构思、总成件检具的使用、焊接 工艺分析、焊接夹具机构的构想、零部件公差的正确选取与合理分配等众多方面。一般而言, 典型的轿车车身由 400 多个零件,经过 200 多道装配工序,2500 个工装定位点,由 4000、 6000 个焊点焊装而成。白车身产品结构和制造工艺都非常复杂,工艺质量控制十分困难。
车身尺寸控制的好坏不仅能反映在整车外观及装配性的优劣,影响到顾客对产品的评价 及汽车产品的市场前景,而且车身尺寸偏差还与整车性能息息相关,影响到产品的密封、噪 音、寿命、动力性等性能。根据 J.D.Power 全世界汽车产品质量关键问题调查评估的报告显 示:有 41%的汽车产品质量问题由车身制造尺寸偏差所造成。因此,对车身制造尺寸偏差的研究及控制尤为重要。
为改变在质量上落后的局面,美国汽车行业在美国密歇根大学华裔教授吴贤名和倪军的倡导下,联合通用、克莱斯勒等车企以及美国商务部等政府部门,与美国密歇根大学等科学院所共同投资,开展了一项旨在提高车身制造质量的全面计划,目标是将美国汽车的白车身 尺寸误差降低至日系车水平,这就是“2mm 工程”(2mm Project)。
(3)CII 指数法控制误差,“2mm 工程”成效斐然
1992 年,“2mm 工程”正式启动。吴贤名教授 Michigan 大学团队、通用、克莱斯勒、等 八家供应商、两所大学(密大和韦恩州立大学)向美国国家标准局(NIST)提出成立“车体 精密制造联盟”(Auto Body Consortium)的提案,目标就是利用各个汽车装配厂测量机的 海量数据,由大学团队下工厂,提供数据分析支持,与车厂和供应商人员组成多个混合团队, 集思广议,挖质量问题根源,提出测试和落实解决质量改进方案。这个提案在 1992 年得到 批准,并得到三年(1992-1995)约一千四百万美元的资金。
“2mm 工程”的核心目标是降低车身制造误差,控制车身制造质量,主要的测评方法是 CII 指数法。CII 指数(Continuous Improvement Index,持续改进指数)是 Michigan 大学 吴贤名先进制造技术研究中心提出的质量评价指标,它的计算方法是:在一定的时间段内, 对车身全部测量点进行尺寸误差测量,计算 6σ(均方差的六倍),并从小到大进行排序,取 第 95%测点的 6σ 值作为白车身的 CII 值。例如,假设有一串共 100 个数字由小到大排序 0.01、 0.02、0.03……1.00,代表了车身上 100 个测量点的尺寸误差 6σ 值,第 95%测点的 6σ 值为 0.95,则 0.95 就是当次生产车身的 CII 值。对尺寸误差大于该 CII 值的测量点所在区域,需 要重点进行质量控制。将车身精度控制在“2mm”,是指车身至少 95%的测量点的尺寸误差 6σ 值小于 2mm,不可将其简单理解为接缝的宽度小于 2mm。
运用 CII 指数,可以直接寻找车身尺寸误差严重的区域并进行控制。CII 指数具有的重大创新意义,不仅在于提出了新的车身尺寸波动水平的度量指标,更在于通过锁定尺寸误差 最大的 5%的测点所在位置,可以明确需要重点质量控制的区域。应用 CII 指数时,大体上 需要经过如下几个步骤:
(1)测量车身各处误差,求出每个测点的 6σ 值并由大到小进行排 序,取第 95%的测点的 6σ 值,即为 CII 值;
(2)确定 6σ 值大于 CII 值的测点,并判断造成尺寸波动的区域和需要控制的对象;
(3)列出所有可能产生此问题的原因,根据数据分析和实际经验确定各原因的权重;
(4)针对问题提出改进措施,并争取获得其他部门支持;
(5)重复上述步骤,确定新的波动控制点,再进行改良。如此不断改进,车身的整体尺寸质量就会达到很高的水平。

1992-1995 年的“2mm 工程”,在提高车身质量和创新运营模式两方面取得了优秀的成 绩。自 1992 年启动,历经 3 年努力的“2mm 工程”很快显现出了效果,参与其中的两大主 机厂(通用和克莱斯勒)将 CII 值成功地控制在了 2mm 以内,车身质量得到显著提高。同 时,一方面精度的提高减少了返修的发生,从而降低了生产成本;另一方面误差小了也就减 少不必要的耗材,质量精度提高带来的技术性研发费用也可以通过量产来抵消,因而从这一 方面来说也是对成本有很好的消减作用。 “2mm 工程”的成功之处不仅在于提高了白车身的制造质量,而且在于形成了一种提高 产业精度的可行运营模式。在 1995 年,由于“2mm 工程”的重大成功,及密大团队其它的 项目业绩,美国国家标准局(NIST)批准并赞助了汽车机械加工精度有关的 14 个联盟项目, 工作范围扩大至喷漆、焊接、轻金属加工、薄板冲压等领域,同时也和非汽车产业公司如波 音、GE 等进行合作。若干制造业中心也用类似的运营模式,这些联盟一定程度上增强了汽 车业的技术能力,改善了汽车工业的质量。
二、尺寸偏差源于多方面,工业机器人仅为因素之一
实施“2mm 工程”的难点主要体现在冲压件尺寸偏差、焊接夹具、焊接变形、零部件及操作四个方面,影响整个车身制造尺寸偏差的影响因素多种多样,因此我们也可以理解为仅有一小方面的误差来源于汽车行业工业机器人的加工精度。
白车身总成件是轿车车身的基础,典型的车身由若干个冲压件经过焊接、压合、粘接、 铆接等工艺过程合成分总成件,分总成又合成为总成零件,最后组装成汽车白车身。在零部件制造的过程中,零部件装配总成的过程中,加工及装配的尺寸误差会不断累积,工人操作技能也会最终反馈到白车身的误差当中。
根据汽车白车身精度控制思路与方法的探讨,以大众公司的迈腾汽车的左后门轮廓尺寸为例,在测量零件、总成和车身时,根据零件的统一基准按六点定位准则直接建立在测量坐标系上,检验 RPS 点尺寸合格后就可以进行零件单点尺寸的测量。迈腾左后车门的部分功能尺寸被要求控制在所在坐标系平面、所在轴向距离±1.0mm 或+1.5/-0.5mm 范围内,此精度要求是远高于工业机器人可实现的重复定位及加工精度范围,多余的精度误差范围可留给其他的尺寸偏差影响因素。
(1)冲压件尺寸偏差影响整体尺寸精度
冲压件的尺寸误差将在工件相互压紧时,产生变形,影响车身尺寸的精度。车身是由成百上千的冲压件互相连接、组焊形成的,在各件之间都会有贴合面或焊接面,这些面被称为搭接面,工件的尺寸精度通过这些搭接面传递形成车身的尺寸精度。假设在某一工序中的冲压件尺寸发生了偏差,导致在装配时工件搭接面之间间隙或干涉,过渡不协调,在夹具上用较大的压紧力强行把工件搭接在一起时,工件之间将产生强制变形,必然会造成装焊误差, 影响车身尺寸的精度及稳定性。
以下方法和途径可有效提高冲压件尺寸的精度和稳定性。(1)产品结构的控制。一是简化产品结构,降低冲压工艺难度,提高工件的成型性和稳定性;二是采用整体冲压工艺, 如“整体门框”、“整体侧围”等;三是为工件定位设置专用的定位孔和定位面,提高工件在夹具定位时的重复定位的精度;四是为工件增加拉伸筋,用于收料和提高工件的强度,提高工件在大批量生产时的一致性。(2)模具的保证。模具的精度要高,材质必须耐磨,保证模具在大批量生产时的耐用性和制件稳定性;定期进行模具维护,并且在维护后进行冲压件的检测,以保证冲压件的一致性。(3)冲压机床的保证。各模具在制件时,尽量使用相同的机床;其模具在冲压机床中的摆放位置、摆放的方向尽量一致,以使模具的平行度尽量一致。(4)板材。钢板在使用前,应先检测其性能,根据不同的性能用于不同的工件。
(2)焊接夹具或是制造缺陷的重大因素
焊接夹具与汽车制造的精度具有很大的关系。焊接夹具在车身生产中的作用是:通过夹 具上的定位销、基准面、夹紧臂等组件的协调作用,将工件安装到工艺设定的位置上并夹紧, 不让工件活动位移,保证车身焊接尺寸精度的一致性和稳定性。夹具定位不可靠、夹具磨损、 定位松动、夹紧失效等问题必定会造成工件焊接位置偏差,而导致分总成尺寸偏差,影响到 车身总成的尺寸偏差。美国 2mm 工程报告指出,有 75%的制造缺陷和夹具失效有关。 从焊接夹具设计、制造精度、调整、使用和维护等几方面可对进行精度控制。(1)夹具设计。夹具设计从以下几个方面考虑:一是汽车焊接夹具的设计中,方式定位采用“N-2-1” 定位原理;二是焊接夹具设计基准与车身设计基准、冲压基准、检测基准统一;三是夹具设计时要求夹具定位结构规范化,便于调试及维护;四是辅助支撑设置要合理,避免过定位。(2)夹具制造精度。夹具的精度应能确保零件在夹具上自由服帖,当所有夹紧点夹紧后工件不会有松动窜动的现象;(3)夹具调整。夹具调整前要分析是否会造成其他影响, 调整时要进行试验,验证合格后方能进行调整,调整后要时下工序做好跟踪验证,如出现其他问题时需要马上恢复夹具,夹具调整需要做好更改及验证记录;(4)夹具使用和维护。 操作者要按照标准化操作正确使用夹具,定期对夹具进行点检和维护;定期使用检测设备对夹具进行测量,以确定夹具是否需要维修和精度恢复。
(3)焊接变形难以定量计算
焊接变形引起的焊装误差一般比较难于定量计算,对焊接工件造成的尺寸误差也可能较大。焊接变形量的确定应通过理论分析与实际测量相结合,对不同的部位、不同的焊接方法、 焊接规范和不同的焊接顺序等都要具体分析。 一般可通过以下几方面控制焊接变形量。(1)焊接方法。汽车车身焊装所采用的焊接方法以电阻点焊为主,CO2保护焊为辅。采用先进焊接设备,如机械手、自动焊、引出焊等, 这些设备不仅能使车身焊接时焊点均匀,点焊顺序稳定,而且能提高焊接速度,最大限度减 少车身焊接变形量。(2)焊接工艺。在定位夹具夹紧的状态下设定定位焊点,在补焊台实现补焊。这要求在工艺文件上对焊点位置、数量、间距和点焊顺序都应明确规定,并且要求 操作者严格执行。(3)焊接规范。汽车点焊采用强规范,即用大电流和短时间焊接,使薄板件的焊接变形较小。合理设置焊接参数,调试焊接压紧力,减少焊接变形。
(4)人工操作亦影响零部件尺寸
零部件的质量、包装和人工操作也会对车身质量产生影响。零部件尺寸不合格会造成焊 接误差,从而影响车身尺寸偏差。所谓零件尺寸不合格,是指零件实物尺寸和产品设计图纸 不一致。在整车所包含的零部件中,有很多是由不同的供应商提供的,因存在技术水平上的 差异,提供的零部件质量也存在一定的差异,这些差异在整车制造过程中产生累积误差,影响车身尺寸精度及整车品质。物流包装影响零部件不同的包装方式及运输方式会对零部件尺 寸和变形产生不同的影响,而零部件定位孔、搭接边变形会影响车身尺寸偏差。人工操作过 程产生的误操作也会对车身精度产生影响。 因此,必须要严格控制零部件尺寸精度,所有焊接零件必须检验合格才能投入使用,特 别是车身上一些主要的装配孔、工艺孔的位置尺寸和搭接面尺寸是必须控制的;必须改善各 供应商的零部件包装及物流方式,将物流过程中的零部件状态变化纳入质量管理范畴,防止 运输过程中零部件之间的碰撞变形;必须正确评估分总成的转运工具和吊装工具对尺寸和变 形的影响,操作者要严格按照操作规范来操作,操作过程中保证焊钳与工件垂直,减少操作 不规范、不正确带来的随机的制造误差。
监控质保部门进行尺寸监控。通过建立功能尺寸系统,掌握总成尺寸监控点的位置,定 期对车身结构尺寸进行测量监控,及时发现问题,并进行反馈整改。
内外表面精测样架。汽车内饰由部件构成并且任意点都为零基准。用于测量零件几何尺 寸和功能检验。可以对内饰件的装配和零件之间的匹配进行评价,也包括对天窗、前后风窗 的匹配尺寸评价等。对车身外覆盖件的总成匹配进行评价,包括从白车身到总装的外表面件。 在首批样件的检验和认可中做测量分析,对压合件和冲压单件的轮廓尺寸进行评价,为下一 步尺寸改进确定优化方向。
生产过程中的检测手段。(1)使用辅助检具样板。在产品研发初期,先期采购定制的辅 助量、检具,包括:车身四门两盖检具、前后风窗检具、天窗检具、后尾灯检具、前端检具、 间隙平度测量两块等。在生产过程中,根据实际需求可自制检具,检查实车功能尺寸状态, 出现问题及时与上下道工序沟通反馈,及时整改。(2)匹配尺寸监控。根据产品匹配数据要 求,确定匹配检查控制项目及检查频次,监控车身尺寸状态。(3)激光在线测量技术。通过 在线检测,可以测量车身特征部位的三维坐标值,综合精度不低于 0.1mm。测量公差可根据 需要自行设定,出现偏差自动报警,实现尺寸控制的自动化。
简而言之,美国汽车行业为提高汽车质量而发起的“2mm 工程”,其难点在于空间工序 上的误差累积、设备磨损与误操作以及设计水平与装备水平等方面,相较之下对工业机器人的要求并非极高。不论是广泛到“2mm 工程”的实施还是具体到迈腾左后车门的轮廓尺寸, 汽车白车身或其他工业品的加工总成都涉及多项加工工艺、工艺流程设计、作业者操作等多方面,在整个过程中误差会不断累积,因此,相对来说工业机器人对零部件加工工序仅为其中的一环,对工业机器人的加工要求并非极高。
三、国产汽车机器人精度紧跟国外,或迎百亿市场空间
影响汽车制造精度的因素多种多样,处于制造环节的工业机器人是其中重要的一环,为研究国产汽车工业机器人能否满足汽车生产的要求,我们对比了国内外汽车工业机器人在 “2mm 工程”中主要运用到的工序(焊接、冲压、折弯)的精度与其他参数,我们认为国产汽车工业机器人的精度虽做不到极致,但在满足焊接和折弯领域的汽车加工工艺上,已经可以达到要求的加工精度。2020 年,我国工业机器人行业销量明显呈回暖趋势,同时汽车行业存在边际改善,应用 于汽车行业的工业机器人需求空间大。经测算,我们认为中国汽车工业机器人市场规模达百亿元,市场空间广阔但国产机器人的渗透率仍然较低,未来随着国产工业机器人在汽车制造业逐步得到认证,国产替代空间有望进一步打开。
(1)国产工业机器人精度及各项指标不逊于国外品牌
工业机器人在汽车制造生产中的运用广泛,包括焊接、喷涂、冲压、搬运、装配、折弯 等,在“2mm 工程”中主要涉及的运用工序有焊接、折弯和冲压。本文通过查阅公司官网与 产品手册,以不同工序为分类基础,在同等负载量级的情况下,将国内部分工业机器人公司 的产品精度及其他参数与国外机器人“四大家族”ABB、安川、库卡、发那科的工业机器人 进行对比。
不同的企业可能对工业机器人的负载级别划分标准不尽相同。如埃斯顿将负载级别分为 四类:小负载(0~30kg)、中负载(30~100kg)、大负载(100~350kg)和超大负载(>350kg)。 而安川则将负载级别分为五类:小型、一般小型、中型、大型、超大型。在对国内外工业机 器人进行精度比较时,首先需要确定功能用途,其次便是确定其负载级别。本文采用的是埃 斯顿的负载分类标准。
我们选择相同自由度条件下的工业机器人进行参数对比,自由度越高的机器人可以完成 的动作越复杂,通用性越强,应用范围也越广,但相应地其技术难度也越大,以下我们选取 的均为六自由度机器人。除自由度指标外,工作空间反映机器人可以应用手爪进行工作的空 间范围,运动速度会影响机器人的工作效率和运动周期,位置精度决定工业机器人在作业中 的定位精度和重复定位精度,都是衡量机器人工作质量的重要技术指标,因此我们主要选择以上几个参数将国产及进口机器人进行对比。
在小负载焊接领域,国产工业机器人的重复定位精度已与“四大家族”产品大体相当, 在最大速度上则稍逊于国外品牌。埃斯顿 ER6-1600 型重复定位精度达 0.08mm,新松 SR10C、 新时达 SA1800 和埃夫特 ER6-1400 型号重复定位精度均可达 0.05mm,和 ABB 的 IRB 1600 系列相当,不逊于安川 AR1440 的 0.08mm。在臂展上,国产小负载焊接机器人最大工作距离均能达到 1400mm 以上,与国外品牌平齐。而在最大速度上,国产品牌相较国外品牌有一定的差距。根据资料,点焊机器人的精度要求一般在 0.25mm 以下,弧焊机器人要求的重复定位精度则应小于焊丝直径的 1/2,即 0.2~0.4mm。在 2016 年中国机器人产业联盟公布的三项标准中,《弧焊机器人系统通用技术条件》明确表示重复定位精度的数值应小于等于 0.2mm。 由此可见,国产品牌焊接机器人精度足以满足汽车焊接生产的需要。
在中负载折弯领域,国产机器人精度接近部分国外机器人型号,小负载折弯领域国产机器人精度与国外相当。新时达 SR85B 系列的重复精度达 0.1mm,接近了 ABB 和安川的产品。 埃斯顿折弯机器人 ER80(世界首款六自由度折弯专用机器人)荣获 CAIMRS-2019 年度“工 业机器人奖”,据埃斯顿公司 2018 年 1 月 19 日投资者关系活动记录表:“以折弯机器人为例,埃斯顿对钣金折弯有二十多年的技术沉淀和对工艺的透彻研究,埃斯顿折弯机器人已占 据该细分应用领域很高的市场份额。”根据无锡微色奇科技有限公司官网介绍,配天机器人 技术有限公司生产的 AIR20-A 型号六轴折弯机器人,在 20kg 的负重下重复定位精度可达 0.03mm。根据 ImRobtic JQRZX网络及上海图灵制造机器人有限公司数据显示,目前国 内市场主要机器人重复定位精度较大份额在 0.2mm 及其以上,由此可以显示国产机器人和国 外机器人均可以满足目前国内市场的主要需求。
冲压机器人领域,国产部分机型精度与国外品牌精度平齐。埃斯顿 ER170-2650 与新松 SR120D 重复定位精度达 0.2mm 与安川 EPH130D 相同,但相对于库卡和发那科的 0.05mm、 0.03mm 尚存一定差距,有向国际先进产品接近的空间。在小负载冲压领域,埃夫特于 2017 年推出的 ER12-C304 冲压机器人重复定位精度可达 0.07mm,向高精度冲压领域前进。另外, 据国产品牌拓斯达官网,其在冲压自动化解决方案中运用了一款自产冲压机械手产品,其重 复定位精度可达 0.1mm。在在 2016 年中国机器人产业联盟公布的三项标准中,目前埃斯顿 等国产品牌均符合《冲压机器人系统通用技术条件》显示的重复定位精度国家标准。
我国国产品牌汽车工业机器人市场渗透率目前仍低,国内汽车生产商主要运用的还是国 外品牌机器人。通过对不同种类机器人的工作参数分析,我们认为目前国产工业机器人的加 工精度虽不及四大家族,但对于当前汽车制造业的加工要求已能够满足,未来伴随我国汽车 制造业的发展,国产工业机器人的加工精度也会提高,有追赶国外品牌的潜力。由于进入汽 车行业需要一段时间的认证周期,需要下游企业对国产产品力进行确认,在国产化的大趋势下,我们认为国产品牌汽车工业机器人扩增本土市场份额指日可待。
(2)汽车工业边际改善,产量销量有望回升
随着全面复工复产的推进以及促进汽车消费政策的出台,我国汽车工业行业逐渐转暖。汽车行业在 2020 年上半年受新冠疫情影响,销量暂时陷入低迷。二季度以来,各级政府部 门陆续出台鼓励汽车消费举措:上海市印发《关于促进本市汽车消费若干措施》的通知;深 圳市推出了促进新能源汽车消费的政策,放宽个人新能源小汽车增量指标申请条件,扩大个 人增购新能源小汽车车型范围,对个人新购新能源小汽车给予综合使用财政补贴。此外,天 津、重庆等城市也出台相关刺激政策,政策托底作用逐渐显现。
据国家统计局数据,2020 年 1-11 月汽车工业增加值持续强势 V 型回升,由年初的-31.80% 回升至 6.3%,11 月当月汽车工业增加值同比增速为 11.10%,持续维持高位。从 PPI 数据来 看,2020 年 1-12 月汽车制造业 PPI 累计同比为-0.40%,降幅持续小幅缩窄,与年初相比小 幅回升,2020 年 12 月汽车制造业 PPI 环比为-0.2%,我国汽车制造业正在边际改善。
汽车销量持续回暖,2021 年仍有望保持增长趋势。从需求端看,根据历史汽车销量数 据,在一个自然年度当中通常下半年汽车销量明显高于上半年,9-12 月为汽车销售旺季。2020 年下半年,政策刺激叠加疫情期间延后释放的消费需求,汽车销量有逐渐上升的趋势。从供 给端看,2020 年 1-12 月汽车制造业固定资产投资完成额累计同比由年初的-41.00%回升至 -12.40%,固定资产投资完成额的边际修复为汽车产量上升提供了支持,反映了汽车行业的 信心正在恢复。
(3)工业机器人市场回暖趋势明显,国产汽车工业机器人空间广阔
国内工业机器人市场回暖趋势明显,12 月机器人产量同比增速达 32.40%,2020 全年累计产量增速达到 19.1%。2009-2016 年中国工业机器人市场销量保持高速增长,2017 年末开始,由于下游 3C 及汽车市场景气承压,相应固定资产投资放缓,中国工业机器人产量增速开始持续下行。2019 年四季度起,中国工业机器人行业逐渐复苏,2019 年 Q4 产量同比大幅上升 54.53%。2020 年 Q1 工业机器人在疫情影响最严重的期间,展现出了行业的韧性,产量实现同比 7.16%的增长。2020 年第二季度开始工业机器人产量呈现持续强势复苏。2019 年 10 月至今,工业机器人产量连续同比增速为正,行业回暖趋势明显。
制造业劳动力成本逐渐提高,驱动中国工业机器人密度上升。
随着产业升级导致的低技术、重复劳动工作减少,叠加劳动力供不应求的现状,我国各行业用劳成本明显提高,而制造业工资上升明显高于其他行业。2019 年,我国制造业就业人员平均工资为 78,147 元/年, 制造业平均工资高出建筑业、居民服务和其他服务业、住宿和餐饮业 19.16%、29.74%、55.22%。 工业机器人的发展与制造业息息相关,由于制造业用劳成本不断提高,越来越多的企业把工业机器人作为劳动力的替代品。2011 年我国工业机器人密度为 10 台/万名工人,2018 年已提 高至 140 台/万名工人,CAGR 达 33.35%。
工业机器人下游应用广泛,主要应用行业包括汽车、电子电器、金属制品、化学橡胶塑料、食品制造等行业,根据 IFR 统计,2019 年全球范围内工业机器人在上述行业中的应用占比分别为 39.90%、29.05%、12.15%、7.87%、3.50%,汽车行业和 3C 占据工业机器人需求超过 50%。其中,汽车行业应用比例虽然呈现逐渐下降的趋势,但以其庞大的行业规模基础和较高的自动化率,常年稳居工业机器人下游需求规模第一位。
中国汽车工业机器人本体市场有百亿元级的市场规模。据 CRIA 与 IFR 统计,2018 年中 国工业机器人市场累计销售工业机器人 15.6 万台,其中汽车制造业新增 4 万台,汽车制造业 工业机器人的销售数量占例为 25.64%;自主品牌机器人销售 4.36 万台,数量比例为 27.95%。 根据《中国工业机器人产业发展白皮书(2020)》,中国工业机器人市场规模的增速在 2017 至 2019 年有所放缓,但未来几年随着下游产业需求的提升,市场规模增速仍可稳步抬升, 中国工业机器人 2020 至 2022 的市场规模预计可实现 422.1 亿元、478.8 亿元、552.3 亿元。
根据 CRIA 和 IFR 的数据我们假设汽车行业所用工业机器人占我国工业机器人总市场规 模的比例区间为[25%,40%],推算出我国汽车制造业所使用的工业机器人在 2020 至 2022 年的市场规模区间分别为[105.5,168.8]亿元、[119.7,191.5]亿元、[138.1,220.9]亿元。由 于我国老龄化进程加速及用劳成本的增加等原因,国内自动化改造需求仍然较大,据我们推 算以汽车行业为下游的工业机器人市场规模仍然乐观。
国产工业机器人替代空间较大。根据《2020 世界机器人报告》,目前中国各行业所使用 的机器人,仍主要来自国外厂商,在新安装的机器人中,有 71%来自外国供应商。对于中国 本土制造商,一方面他们的产品主要迎合国内市场,海外市场尚处开拓阶段;另一方面他们 在国内市场所占的份额不大,汽车行业的中国供应商仅有的市场份额更是比较有限。因此, 国内工业自动化市场国产化率的提升空间很大,未来有巨大潜力可以挖掘。
根据中国机器人产业联盟《2018 中国工业机器人产业市场报告》,多关节机器人的国产 化率仅为 17.50%。多关节机器人技术水平要高于其他机械结构机器人,目前国内企业在多 关节机器人技术水平上与外资存在一定差异。在汽车制造业、3C 电子制造业中应用的焊接、 装配机器人对一致性、可靠性的要求较高,因而所应用的工业机器人技术水平要高于其他功 能的机器人,在这些领域工业机器人的国产化率也相对较低。
根据 CRIA 的数据,我们假设国产工业机器人在整个工业机器人市场中的渗透率在 2020 年为 20%左右,而且未来每年可提升 3%~5%。以《中国工业机器人产业发展白皮书(2020)》 中预计的中国工业机器人市场规模(2020 年至 2022 年预计可实现 422.1 亿元、478.8 亿元、 552.3 亿元的市场规模)为基准,推算出我国国产工业机器人在 2022 年的市场规模区间在 143.6~165.7 亿元,跟随中国工业机器人市场规模的扩大,并叠加国产工业机器人渗透率的提 升,我国国产工业机器人预期对应的市场规模年均增速预计可达 30%以上。 总结来看,1992 年,美国汽车行业为应对日系车大举进军美国市场的威胁,提出了提高 车身质量、挽回已失市场的“2mm 工程”,并取得了卓越的成效,成功地将车身误差 CII 指数 降低至 2mm 以下。实施“2mm 工程”主要难点源于以下几个方面:冲压件/零部件尺寸偏差、 焊接夹具定位不稳定、焊接变形及操作影响,而其中涉及工业机器人精度要求并非极高。针对“2mm 工程”中工业机器人涉及的工序,对比国产与国外机器人的重复定位精度及其他参数, 我们认为国产工业机器人在焊接、折弯等领域的精度已经接近国外机器人,同时足以满足汽 车生产的需求。在我国工业机器人市场回暖趋势明显、汽车行业保持工业机器人下游需求规 模第一位的情况下,我们认为中国汽车工业机器人市场规模仍有广阔空间,国产替代能力正 逐步增强。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 NKZ41H-10C 铸钢法兰真空闸阀
NKZ41H-10C 铸钢法兰真空闸阀 仕创艾 光纤激光切割机 数控激光切割机 金属激光切割机生产厂家
仕创艾 光纤激光切割机 数控激光切割机 金属激光切割机生产厂家 家用电焊机230A汽油焊机报价
家用电焊机230A汽油焊机报价 逆变直流手工弧焊电焊机 ZX7-315 工业级电焊机 双机芯超稳定
逆变直流手工弧焊电焊机 ZX7-315 工业级电焊机 双机芯超稳定 三门峡 不锈钢 焊接机器人 管道焊接机器人
三门峡 不锈钢 焊接机器人 管道焊接机器人 小型自动氩弧焊机厂家供应
小型自动氩弧焊机厂家供应 江苏厂家促销星脉高科ZX7250便携式逆变直流电焊机弧焊机家用电焊机220V380V电源焊钳焊把线一站式购物
江苏厂家促销星脉高科ZX7250便携式逆变直流电焊机弧焊机家用电焊机220V380V电源焊钳焊把线一站式购物 供应18650 3.6V 2800mAh 宽温锂离子电池
供应18650 3.6V 2800mAh 宽温锂离子电池








