
新年伊始,艾利特机器人迅速开启节后新一轮招聘。作为在协作机器人行业快速崛起的黑马,艾利特看好协作机器人未来发展。并诚挚邀请各路精英在协作机器人赛道即将爆发的之际加入我们,将你的才华和梦想在这个舞台上尽情展露。
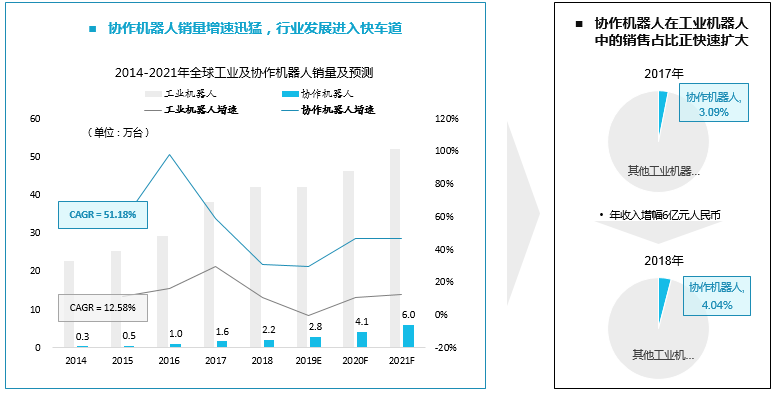
协作性工业机器人在20世纪末期由美国西北大学的两位教授提出,经过近20年的研究、开发再到市场的教育,2013年、2014年协作机器人便开始在工业上批量落地。近十年来,在全球工业机器人市场整体放量的基础上,协作机器人作为其中一个分支品类以每年符合增长率远高于工业机器人的增速在发展,因此协作机器人的的累积销量和相对占比正迅速提升。根据IFR最新数据显示,协作机器人在工业机器人中的占比有望达到6%,这也在某种程度上论证了,协作机器人正在成为跑赢其他机器人品类高速落地的一项技术,未来可期。
从垂直领域来说,协作机器人在工业上的典型应用领域是汽车零部件、3C电子、金属加工行业;从应用的种类来说主要集中在是取放、组装、检测、拧紧等具有可重复性和机械性,且兼备柔性制造需求的的场景。对于有着丰富应用场景的中国市场而言,除了工业领域,商用领域也蕴含着大量机会——新零售、医疗、农工业,都有可能成为未来的爆点。
简历投递请发至此邮箱:[email protected]
招聘岗位
01
IT系统软件工程师 2名
工作地点:上海张江
岗位工作职责:
根据公司发展需求,组建和维护IT系统
岗位要求:
1.3年以上工作经验,负责企业ERP系统开发、配置与维护
2.负责公司新产品导入,生产测试软件及其辅助工具的研发、单元测试、集成、版本发布等工作。定制工厂工程人员进行维护规范标准。
3.有较强的先进技术感知能力和学习能力
4.为人和善,能与团队成员高效地沟通, 能调动技术人员的积极性和进取心,合理安排工作。
技能要求:
1.熟悉js、python等至少一门常用脚本语言
2.熟练使用Linux常用系统指令,熟悉shell脚本编程
3.熟练掌握Javascript、Html5,使用过bootstrap优先。
4.熟练掌握Go语言,熟悉MVC框架。了解MySQL或任意一个数据库引擎,并能熟练使用SQL语句。
5.熟练掌握git,了解软件编译,发布,部署流程。
6.有开源ERP(如:Odoo)运维经验者优先。
7.有电子产品新产品导入工作经验者优先,熟悉生产制造等各环节控制流程者
02
测试经理 1名
工作地点:苏州工业园区
岗位工作职责:
1.给测试组成员指派项目任务,把控测试进度、监督并指导测试组的工作
2.协调测试组配合其应用部的验证工作
3.学习测试方法,并组织测试工程师学习方法
4.完成领导交代的其他任务
主要工作权限:
1.协调并管理测试组员的工作
2.参与测试工程师的绩效考核
3.与其他部门协调,提供测试组所需的内外部资源
4.维护Testlink、测试工具相应权限
5.编写用例、测试脚本,检查并审核用例
岗位要求:
1.3年以上机器人产品测试经验,1年以上测试团队管理经验
2.熟知测试流程,能根据软件需求、项目设计文档编写测试文档,包括测试方案、测试用例、测试脚本,最后形成测试报告。
3.在测试中,能准确确认BUG类型、严重程度、影响范围。在提交BUG单中准确清楚地描述BUG现象和复现条件
03
力传感器算法工程师 2名
工作地点:苏州工业园区
职责描述:
1.负责机器人关节扭矩传感器和六维力传感器关键算法的仿真和开发实现;
2.对关节扭矩传感器和六维力传感器的数据进行后期信号处理,包括去噪,滤波等;
3.负责对算法性能进行统计评估,包括相关性与回归分析,敏感度与特异度分析,最小样本值估算等;
4.部门安排的其它工作。
任职要求:
1.硕士及以上学历,数学、电子、通信、自动化、机械、材料等相关专业,3年以上相关工作经验;
2.了解数字滤波器设计等数字信号处理的基本理论;
3.具备对现实问题抽象出数学模型的逻辑分析能力,并能够求解数学问题;
4.熟练掌握C/C++语言和Matlab仿真软件;
5.自学能力强,有数字信号处理或嵌入式软件开发经验,有力/力矩传感器信号处理开发工作经验者优先;
6.对算法研究具有浓厚兴趣,愿意从事研究工作。
04
力传感器工艺工程师 2名
工作地点:苏州工业园区
职责描述:
1.应变式力传感器的工艺编制,并跟踪工艺实验和验证工作;
2.力传感器生产工装夹具设计;
3.分析解决生产现场出现的异常及质量问题;
4.部门安排的其它工作。
任职要求:
1.本科及以上学历,机械、材料等相关专业,2年以上相关工作经验;
2.熟练应用CAD设计软件及基本办公软件;
3.熟悉应变式力传感器生产工艺;
4.熟悉焊接、点胶、灌封等传感器组装工艺;

05
嵌入式系统软件工程师 2名
工作地点:上海张江
岗位工作职责:
1.承担嵌入式操作系统(如:Linux)系统平台的软件开发,平台启动、驱动程序优化等操作系统内核及相关工作。
2.参与技术难点的攻关,解决项目中遇到的技术难题。对组员遇到的技术问题提供技术帮助。
3.项目前期方案可行性评估,协助硬件芯片选型。
4.Yocto、Jenkins编译系统新功能添加、问题修复、系统发行、系统升级。
5. 协调应用层软件在特定嵌入式平台的移植及性能优化工作、项目棘手问题解决。
主要工作权限:
1.负责实时化Linux平台及相应驱动的开发、维护
2.负责各个平台Bootloader的开发、维护
3.评审组内其他成员提交的代码
岗位要求:
1.5年以上Linux内核开发经验,负责嵌入式Linux系统体系结构设计,系统内核的维护。
2.独立完成过framebuffer、I2C、eMMC、FPD-link等设备驱动程序的编写。
3.有U-Boot优化、微调经验。
4.对Linux系统内核及驱动程序有深入理解,可以对Linux内核进行深度修改和定制。可以独立编写Linux驱动程序并对驱动程序进行深度的优化。
5.有Qt、Java等应用程序开发经验者优先。
6.强大的问题解决能力及不畏惧困难的精神
7.能细致、主动跟进各种研发过程中的issue
技能要求:
1.精通ARM芯片中各种硬件的原理并能编写、维护相应驱动,如:I2C、DMA、eMMC、framebuffer、蓝牙、GPS、LVDS。
2.掌握计算机色彩空间理论,并理解各种色彩空间与LCD Controller的关系。
3.熟悉Qt或者Java 渲染的原理、运行机制,并能为各种不同平台移植显示引擎。
4.熟悉Linux系统的Makefile、shell等各种命令工具及工作原理。
5.熟悉常用的伺服总线和通讯总线通讯协议。
6.熟悉gcc、Makefile,了解编译相关的过程和知识,能独立维护Linux的各种开源项目。
7.良好的英文阅读能力,阅读芯片datasheet并理解其工作原理。
8.理解软件版本管理。作为维护者,熟练掌握git的使用。

06
嵌入式应用软件工程师 2名
工作地点:上海张江
岗位工作职责:
1.负责机器人产品人机交互及控制相关的软件开发工作
2.参与人机交互效果的预研工作,参与技术难点的攻关
3.解决软件开发中遇到的难题,保证软件按时按质交付
4.组织组内技术交流/培训, 整理/维护组内代码规范
5.协助应用部评估客户新需求的技术难度,评估所需时间及在目标平台上的性能
6.共用模块、中间件的设计、开发与维护

岗位要求:
1.5年以上嵌入式系统软件研发经验,3年以上linux应用软件开发经验,3年以上c++和java开发经验。
2.有较强的先进技术感知能力和学习能力。
3.为人和善,能与团队成员高效地沟通, 能调动技术人员的积极性和进取心,合理安排工作。
4.对嵌入式软件的性能优化有一定经验。
5.了解工业或协作机器人相关行业的发展及趋势
技能要求:
1.熟练使用linux常用系统指令,熟悉shell脚本编程,熟悉Ubuntu系统环境和应用
2.熟练使用C++/Java编程语言。尤其是基于Swing或者JavaFx的开发。
3.熟练使用Qt Quick编程,熟悉C++/Qml混合编程。
4.作为使用者,熟练使用git版本管理工具。
5.掌握TCP/IP以太网协议及Socket的网络编程。
6.熟悉数据库(SQLite、MySQL等)、Web开发者优先
7.熟悉OpenGL 2.0以上的图形渲染机制者优先
8.能细致、主动跟进各种研发过程中的issue并适时与相关同事沟通

07
嵌入式MCU软件工程师 2名
工作地点:上海张江
岗位职责:
1.理解产品软硬件需求,完成实时系统嵌入式软件设计与维护;
2.配合硬件工程师完成硬件调试和测试;
3.配合硬件研发和生产设计测试工装的嵌入式软件;
4.根据部门规范编写相应的技术文档;
5.完成上级交办的其他工作。
岗位要求:
1.3年以上嵌入式C/C++软件研发经验;
2.对MCU软件开发有丰富经验,对软件的性能优化有一定经验;
3.有Linux驱动软件开发经验优先;
4.有较强的先进技术感知能力和学习能力
5.为人和善,能与团队成员高效地沟通, 能调动技术人员的积极性和进取心,合理安排工作。
08
机器人运动学算法工程师 2名
工作地点:苏州工业园区,上海张江
职责描述:
1.负责多轴机器人运动学建模与仿真,正逆解算法的设计与实现
2.负责多轴机器人路径规划、轨迹插补,前瞻及自适应算法的设计与实现
3.负责多轴机器人奇异点分析与规避算法的设计与实现
4.负责多轴机器人DH参数辨识与标定算法的设计与实现
5.负责算法计算量分析与计算量优化
6.负责算法相关开发文档的编写与整理
任职要求:
1.硕士及以上学历,机电、自动化、计算机或数学相关专业
2.具有较好的数学功底和良好的英语阅读能力
3.精通C/C++/Matlab,具备较强编程能力
4.具有较强的分析和解决问题能力,有持续自我学习的能力和意愿,善于沟通和逻辑表达
5.熟悉Linux操作系统者优先
6.从事过机器人速度规划优先
7.熟悉运动控制器相关功能,有机器人控制系统开发调试经验者优先

09
机器人动力学算法工程师 2名
工作地点:苏州工业园区,上海张江
职责描述:
1.负责多轴机器人动力学建模与仿真,力控算法的设计与实现
2.负责单关节动力和多轴机器人动力学模型参数识别,控制参数整定
3.负责动力学中非线性因素的分析与补偿
4.配合运动学实现多轴机器人自适应力控算法的设计与实现
5.负责算法计算量分析与计算量优化
6.负责算法相关开发文档的编写与整理
任职要求:
1.硕士及以上学历,机电、自动化、计算机或数学相关专业
2.具有较好的数学功底和良好的英语阅读能力
3.精通Adams,Matlab/Simulink,精通C/C++,具备较强编程能力
4.具有较强的分析和解决问题能力,有持续自我学习的能力和意愿,善于沟通和逻辑表达
5.熟悉Linux操作系统者优先
6.熟悉运动控制器相关功能,有机器人控制系统开发调试经验者优先

10
硬件设计工程师 2名
工作地点:苏州工业园区,上海张江
工作职责:
1.负责机器人本体硬件设计,原理图绘制,Debug处理,PCB Layout。
2.负责设计硬件的生产工装,包括但不限于:测试工装,固件下载工装,以及老化工装等。
任职要求:
1.电力电子、电气传动、电气自动化相关专业,本科及以上学历;
2.有3年及以上硬件开发工作经验,能独立承担硬件开发工作,做过已量产产品者优先;
3.熟练掌握 EDA 工具,须熟练使用Altium Designer。同时掌握Cadence(orCAD + Allegro)者优先。
4.至少有一款2K级产品的量产经验,熟悉产品由研发导入生产的流程。
5.有模拟电路和数字电路的基础,设计过以STM32为主控的硬件产品,如果有基于stm32编程基础者优先。
6.开发过伺服驱动器或逆变器硬件,X86平台硬件,A9平台硬件,FPGA硬件者优先。
7.熟悉磁兼容设计,有EMC/EMI测试或整改经历者优先;
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 瑞凌东升ZX7-200迷你款电焊机 便携式电焊机 220V家用全铜芯电焊机
瑞凌东升ZX7-200迷你款电焊机 便携式电焊机 220V家用全铜芯电焊机 安川焊接机器人MA1440焊接机器人
安川焊接机器人MA1440焊接机器人 杰伟浩**出售转让3套全新10吨变位机二手设备二手机床二手机械
杰伟浩**出售转让3套全新10吨变位机二手设备二手机床二手机械 松下YC-400TX4氩弧焊机 直流脉冲焊机YC-400TX4
松下YC-400TX4氩弧焊机 直流脉冲焊机YC-400TX4 VH-63 海光压缩机配件
VH-63 海光压缩机配件 瑞凌东升氩弧焊机WSME-315脉冲氩弧焊机铝焊机
瑞凌东升氩弧焊机WSME-315脉冲氩弧焊机铝焊机 碳钢焊条价格 焊丝焊条天津大桥焊材焊条
碳钢焊条价格 焊丝焊条天津大桥焊材焊条 供应高灵敏度蒸汽减压阀厂家批发价格
供应高灵敏度蒸汽减压阀厂家批发价格








