
相较于刚性机器人,柔性机器人展现出了其所不具备的优势。柔性机器人具有不同的软硬件体系结构:每个关节都配置力传感器,并且底层控制体系结构由原来的位置控制,转变为力和位置融合控制,使机器人兼具高精度位置控制和高动态力控制。
当前,柔性材料的软机器人已广泛应用于各个领域。在许多情况下,为了完成紧急任务(如救援),需要快速制造出适合的软体机器人。现在,浙江大学工程学院教授邹俊就基于刚性机器人仍存在的局限,开发出了一个真空驱动的柔性机器人。
一开始,研究人员提出一种刚柔结合的设计方案,即用一个真空驱动的柔性扭转执行器(V-SPTA,Vacuum-Powered Soft Pneumatic Twisting Actuators)作为软体机器人的 “柔性关节”。
真空动力软气动执行器(VSPAs)是一种有前景的新兴应用技术,包括人造肌肉、可编程运动和柔性抓手。它们具有灵活的变形、清洁的供电、与用户安全的交互等优点。
但是,在机器的构造方面,研究人员依然采用传统的方式,以至于出现了在给软体机器人吸气的时候,机器人无法把运动完全分离开的情况。
在此基础上,研究人员进一步改进。
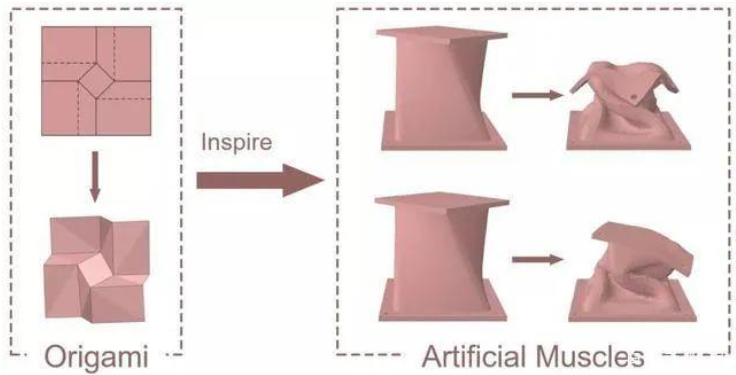
在进一步实验设计中,研究人员通过模块组合将复合运动解耦,实现了单个运动。并且,又模仿传统折纸艺术千纸鹤的折叠运动,设计出一种流体驱动的全柔性人工肌肉。这种人工肌肉可以用于不同的软机器人的快速重构,就像“积木”一样。

此外,它可以通过直线运动、旋转运动、弯曲运动,去实现所有的运动,为柔性材料软机器人的制造提供了一种简便、快速的方法,大大提高了柔性材料的利用率。
同时,折纸设计的应用有助于基于柔性材料的机器人的发展,并在由各种柔性材料如水凝胶、电活性聚合物,液态金属等制成的软体机器人中具有广阔的应用前景。
显然,基于柔性材料的软式机器人在实现各种运动、操作精细物体、提供更安全的人机交互以及适应受限环境等方面展现了出了巨大的可能性,未来也将在更广泛的场景中得到更多的应用。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 长沙市YASKAWA/安川 MA2010 焊接机器人 新余焊接机器人 工业机器人1
长沙市YASKAWA/安川 MA2010 焊接机器人 新余焊接机器人 工业机器人1 ERCu紫铜焊丝焊接工艺性能优良焊缝成型良好
ERCu紫铜焊丝焊接工艺性能优良焊缝成型良好 加工\生产 供应锐龙电焊机
加工\生产 供应锐龙电焊机 TO190A单杠柴油发电电焊机
TO190A单杠柴油发电电焊机 重型滚轮架 河北 KT250可调式焊接滚轮架 可调式焊接滚轮架 专业生产
重型滚轮架 河北 KT250可调式焊接滚轮架 可调式焊接滚轮架 专业生产 邦德激光C系列 激光切割机 板材激光切割机 30000W激光切割机厂家
邦德激光C系列 激光切割机 板材激光切割机 30000W激光切割机厂家 供应华远氩弧焊机 WS(M)-400/500H逆变式直流(脉冲)氩弧焊机
供应华远氩弧焊机 WS(M)-400/500H逆变式直流(脉冲)氩弧焊机 斯派莎克DCV3不锈钢对夹式止回阀
斯派莎克DCV3不锈钢对夹式止回阀








