
美国康奈尔大学的研究人员发明了一种模块化机器人,可以感知未知周围环境,做出决策并自己动脑子采用不同的形状来执行各种任务。
它由几个可以独立运行的机器模块,协作组合成一个“大”机器人。如果一个模块损坏,可以将其拆下并更换。更有趣的是,机器人可以根据任务,判断自己要变成什么形状,然后让模块重新排列。
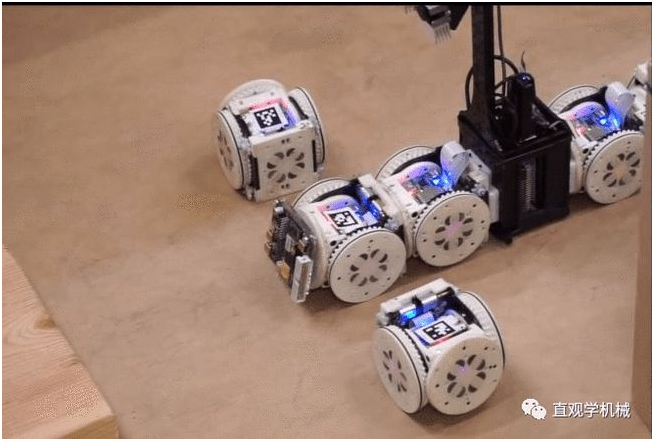
甚至,会派出自己的某个模块,去单独完成任务。就像人的手与身体分离,手还在单位忙,身体却开始在外摸鱼,效率更高了。
模块与模块之间有磁铁相连,同时,并配有Wi-Fi与中央系统进行通信。康奈尔Sibley机械和航空航天工程副教授兼该项目首席研究员Hadas Kress-Gazit说:“这是模块化机器人第一次被自动重新配置和感知驱动的行为。”

Hadas Kress-Gazit教授
Kress-Gazit教授说,其他模块化机器人系统已成功地在受控环境中执行特定任务,但这些机器人是第一个基于任务和不熟悉的环境展示完全自主行为和重新配置的机器人。重点是不熟悉的环境,也就是以前机器人并没有去过这个地方哦,在划线区域来回傻傻散步的机器人。在未知环境下完成任务需要机器人去探索和获取关于它周围的环境信息,并使用这些信息来行动。
我们的系统架构包括主动感知组件来执行同时定位与地图构建(SLAM),选择路径点,探索、识别感兴趣的对象和区域。我们的系统架构还包括一个框架以机器人的能力来描述环境,允许高级规划器主动重新组合机器人以适应不同的环境。

看来,未来机器人的发展是多元化的,期待更有趣的机器人走进我们的视野。
参考文献:
[1]@科技view:会变形的模块化机器人
[3]环球网:新型模块机器人:可在无人机和机械臂间自由切换
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大通孔变位机 管法兰自动焊接专机 ZHB型焊接变位机
大通孔变位机 管法兰自动焊接专机 ZHB型焊接变位机 发那科焊接机器人
发那科焊接机器人 焊接机器人 机器人变位机
焊接机器人 机器人变位机 l批发热销供应多种 一体化电焊机
l批发热销供应多种 一体化电焊机 创力 CANLEE 三维激光切割机器人
创力 CANLEE 三维激光切割机器人 大棚膜选用多厚的合适
大棚膜选用多厚的合适 供应河北现货:ZHB-0 焊接变位机 焊接变位机 品质优良
供应河北现货:ZHB-0 焊接变位机 焊接变位机 品质优良 400A直流氩弧焊发电电焊机-向下焊
400A直流氩弧焊发电电焊机-向下焊








