
在机器人的帮助下,心 脏外科医生可能能够更好地计划手术并改善他们的手术视野。该机器人通过虚拟现实并行系统作为数字孪生进行控制,可以通过超声波对患者进行准确成像,而不会出现妨碍操作人员的手部抽筋或辐射暴露。国际研究团队在IEEE/CAA Journal of Automatica Sinica 上发表了他们的方法。

术中超声特别有用,因为它可以通过提供其他隐藏设备和解剖结构的实时图像来指导手术,复杂系统管理与控制国家重点实验室主任王飞跃说。中国科学院自动化研究所。然而,对高度专业技能的需求始终是可靠和可重复获取的障碍。
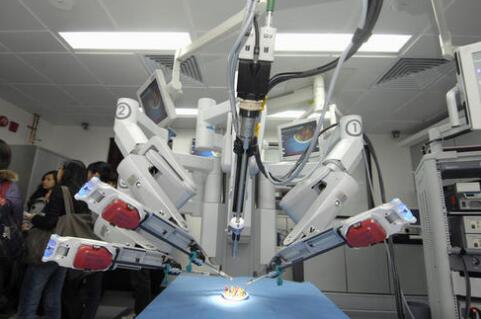
现场超声医师的可用性可能有限,而且许多需要术中超声检查的程序也经常需要 X 射线成像,这可能会使操作者暴露在有害辐射中。为了缓解这些挑战,Wang 和他的团队开发了一个机器人术中经食管超声心动图 (TEE) 平台,TEE 是一种广泛用于诊断心 脏病和指导心 脏外科手术的成像技术。
结果表明,使用带有模拟平台的机器人可能会提高术中超声的普遍可用性,并帮助经验较少的操作者。
研究人员采用并行控制和智能技术,在准确代表真实环境的虚拟环境中将操作员与机器人配对。配备了超声图像数据库和能够重建解剖结构的数字平台,机器人可以为操作员导航目标区域,以便在计算实验中更好地可视化和计划潜在的手术矫正。
这样的系统可用于视图定义和优化以协助预先规划,以及算法评估以促进实时控制和导航。
接下来,研究人员计划将目前提出的并行真实,虚拟系统与特定的临床需求进一步整合,以协助此类成像机器人的转化研究。
最终目标是将虚拟系统和物理机器人集成到体内临床测试中,从而提出一种在医疗操作中使用并行智能的新诊断和治疗方案。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 TO190A单杠柴油发电电焊机
TO190A单杠柴油发电电焊机 新州DTN点凸焊机 铁线五金 家用电器制造 钣金加工制造 微电子及其他领域
新州DTN点凸焊机 铁线五金 家用电器制造 钣金加工制造 微电子及其他领域 【激光切割机】激光切割机价格_激光切割机批发_激光切割机厂家 1
【激光切割机】激光切割机价格_激光切割机批发_激光切割机厂家 1 ABB IRB-2400 焊接机器人 机器人变位机
ABB IRB-2400 焊接机器人 机器人变位机 焊接机器人安川UP20机器人 六轴工业机器人
焊接机器人安川UP20机器人 六轴工业机器人 搬运机器人 自动化机器人 FANUC M-20IA 全新焊接机器人
搬运机器人 自动化机器人 FANUC M-20IA 全新焊接机器人 ARC-250G电焊机 便携式电焊机 小型电焊机 380V三相焊机家用
ARC-250G电焊机 便携式电焊机 小型电焊机 380V三相焊机家用 加工定制折弯焊接304网篮
加工定制折弯焊接304网篮








