
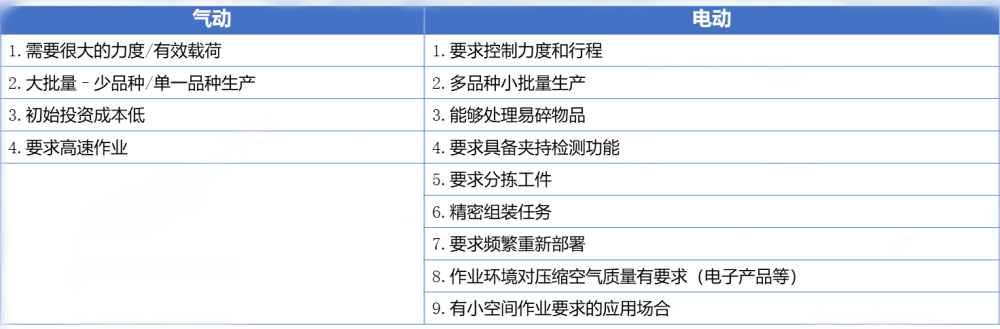
气动机器人夹持器存在的 5 大问题:
1.夹持器始终是全行程作业
只能是开或关,全开或全闭状态。使用相同的夹持器来处理不同尺寸的工件时,需要花费更多的时间才能实现对某些工件的完全操纵。夹持器在处理小工件时,需要工件周围预留有大量的作业空间。在密闭空间中作业时,夹持器可能会干扰周围环境。
2.夹持器控制力度的能力有限
您可以通过控制压力来控制夹持力,但这个过程很难通过编程来实现。想要将夹持力控制在很低的水平其实并不容易,因为在压力非常低的情况下,粘滞作用会阻止夹持器钳口移动。如果要使用同一台机器人对精细工件以及需要更大力度才能抓握住的工件实施作业,调节夹持力的任务会非常艰巨。
3.夹持器控制速度的能力有限
大多数气动夹持器会全速撞击工件。如果工件在被拾取之前没有固定好位置,就有可能会撞到不可预知的位置。
4.压缩空气的常见问题
气动夹持器会影响空气质量。气动系统释放的空气污染物,在有些应用作业是不可接受的(例如电子产品制造)。压缩机消耗的电费以及气动夹持器的维护费用,也是一笔巨大的开支。
5.无内置夹持检测功能
探测夹持器是否已拾取工件是一项有用的功能,可以为用户提供在线防错的机会。用户可以基于夹持器提供的这些反馈,使用夹持器事件而非计时器来对机器人编程,进而编写出更高效的程序。大多数气动夹持器并未内置这一功能,所以如果您想要使用此功能,就必须加装传感器。
电动机器人夹持器存在的 2 大问题:
1.初始成本
通常情况下,电动夹持器在初始投资阶段消耗的成本更多,但是因为运行成本低,而且维护费用比气动夹持器的少得多,所以,如果以长期投资的成本效益来评价电动夹持器,投资电动夹持器通常还是物有所值的。
2.力度有限
电动夹持器的功率尺寸比小于气动夹持器,不适合在高有效载荷应用场合使用。
OnRobot电动夹持器应用演示
那么,应该选择哪款夹持器?
OnRobot电动夹持器家族拥有多样化产品,
满足您的不同需求!
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 尔必地LBD1850-B-6焊接机器人|上下料机器人
尔必地LBD1850-B-6焊接机器人|上下料机器人 博塔重工供应液压组对、行走、可调、电力塔杆用滚轮架 100T 可调式滚轮架
博塔重工供应液压组对、行走、可调、电力塔杆用滚轮架 100T 可调式滚轮架 辉腾 滚轮架 30吨自调滚轮架 滚轮转胎 40吨 60吨滚轮架支持定做
辉腾 滚轮架 30吨自调滚轮架 滚轮转胎 40吨 60吨滚轮架支持定做 30KG变位机
30KG变位机 厂家直销星脉高科WS200便携式家用氩弧焊机 不锈钢电焊机 送氩弧焊枪 货到付款济南星脉机电公司 200氩弧焊机
厂家直销星脉高科WS200便携式家用氩弧焊机 不锈钢电焊机 送氩弧焊枪 货到付款济南星脉机电公司 200氩弧焊机 供应焊接变位机
供应焊接变位机 供应各种型号各种特殊要求滚轮架
供应各种型号各种特殊要求滚轮架 聚丙烯防腐胶带使用效果保持方法
聚丙烯防腐胶带使用效果保持方法








