
10.3.2 用户I/O
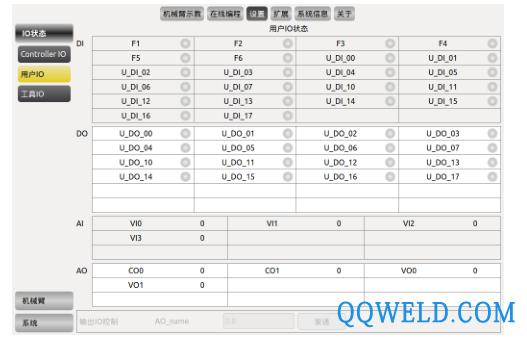
图 10-25 用户 I/O 设置
DI 和 DO 为通用数字 I/O,共有 16 路输入和 16 路输出,可用于直接驱动继电器等电器设备。
F1-F5:为保留 IO 信号,目前不对用户开放。
F6:为清除警报信号,低电平有效。
模拟输入用于显示所采集传感器的电压值,有 4 个模拟输入信号,分别是:VI0、VI1、VI2 和 VI3,范围均为 0V ~ +10V,精度为±1%。
模拟输出用于显示接口板输出的电压/电流值。有 4 个模拟输出信号:分别是 VO0、VO1、CO0 和 CO1,其中 VO0、VO1 输出电压,CO0、CO1 输出电流。
输出 IO 控制:选择需要改变状态的 IO,然后在文本框中输入相应的数值,其中DO 有 low 和 high 两种状态,AO 中的电压输出范围为 0V ~ +10V,电流输出范围为 0mA~20mA(建议输入 4mA~20mA 电流值),选中 IO 名称,点击发送按钮,相应的 IO 即被置为设定值。
10.3.3 工具端I/O
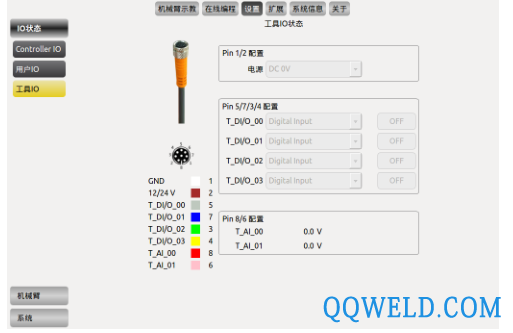
图 10-26 工具端 I/O 设置
工具端 I/O 设置:为末端工具的 I/O 设置状态显示。用户通过管脚 3/4/5/7 可配置 4路数字 I/O,管脚 6/8 可配置为模拟输入,模拟电压输出范围为 0-10V,管脚 2 可配置 0V、12V 和 24V 三种电压输出。
用户在使用此功能前,需根据实际使用情况先配置好管脚 2 的电压以及管脚 3/4/5/7的状态。建议用户在每次使用管脚 2 的电压输出前,重新配置管脚 2 的电压。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 北京辉腾ZT20 自调式焊接滚轮架 20吨自调焊接滚轮架 滚轮架厂家直销
北京辉腾ZT20 自调式焊接滚轮架 20吨自调焊接滚轮架 滚轮架厂家直销 苏州工厂销售5cm高度检测筛
苏州工厂销售5cm高度检测筛 滚轮架
滚轮架 泰克罗伊Techalloy 不锈钢焊丝 ER308L
泰克罗伊Techalloy 不锈钢焊丝 ER308L 【热销】汽油氩弧焊发电电焊机 氩弧焊机生产 希图动力
【热销】汽油氩弧焊发电电焊机 氩弧焊机生产 希图动力 河南省库卡kuka210 点焊焊接机器人
河南省库卡kuka210 点焊焊接机器人 海瑞祥科技 瑞凌焊机 淮北氩弧焊机TIG315A浩达焊机手工弧焊机焊接电缆
海瑞祥科技 瑞凌焊机 淮北氩弧焊机TIG315A浩达焊机手工弧焊机焊接电缆 飞宏FHR-1500 钢筋笼自动焊接机器人
飞宏FHR-1500 钢筋笼自动焊接机器人








