
1. 现场机器人出现如下警告,如何处理?
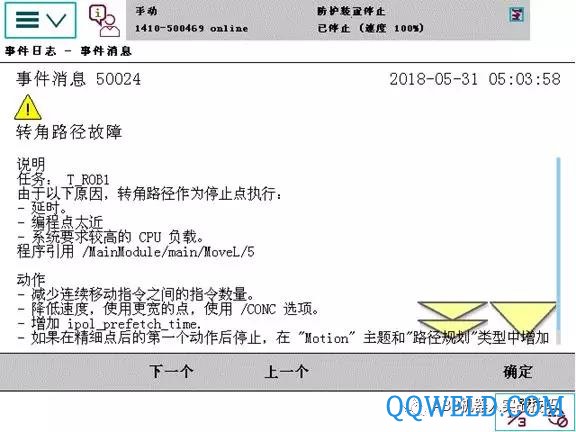
2. 以上只是警告,不是报警,不影响机器人使用
3. 出现上述问题原因可能包括上述给出的解释
4. 通常出现上述警告的原因为:
机器人运动语句moveL等中使用z10等转弯半径参数,此时机器人能做出转角效果,是因为机器人预读了该指令的下一句运动语句,以此来计算转弯半径路径。
如果运动语句为最后一句指令,且没有使用fine(使用了z10等转弯半径),此时由于机器人无法读取到下一条运动指令,所以不能计算转弯效果,即出现上述警告。
机器人会以fine效果走到最后一句运动指令
5. 在robotware6.08中,setting指令集下加入了CornerPathWarning设置语句


设置为False,机器人不会再出现转角路径故障报警。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 瑞凌RILAND电焊机逆变直流氩弧焊机 WS250S小型家用
瑞凌RILAND电焊机逆变直流氩弧焊机 WS250S小型家用 中龙五轴焊接机器人工业机器人
中龙五轴焊接机器人工业机器人 专业数控工业机器人 工业机械焊接机器人 焊接机械手 直销
专业数控工业机器人 工业机械焊接机器人 焊接机械手 直销 天冠铝板带 风行海内外!激光切割机现代工业幕墙选天冠铝板 氟碳喷涂 性能优越,耐持久! 幕墙铝板
天冠铝板带 风行海内外!激光切割机现代工业幕墙选天冠铝板 氟碳喷涂 性能优越,耐持久! 幕墙铝板 便携式190A发电电焊机,汽油发电电焊机报价
便携式190A发电电焊机,汽油发电电焊机报价 焊接机器人 自动焊接设备 自动焊接机 焊接机械手 自动焊接设备 自动焊接机 焊接机械手
焊接机器人 自动焊接设备 自动焊接机 焊接机械手 自动焊接设备 自动焊接机 焊接机械手 供应东升NBC- 200 250 300气保焊机(一体机)
供应东升NBC- 200 250 300气保焊机(一体机) 专业生产KT-1焊接滚轮架|1吨焊接滚轮架|1吨焊接滚轮架大量现货沧州厂家
专业生产KT-1焊接滚轮架|1吨焊接滚轮架|1吨焊接滚轮架大量现货沧州厂家








