
11.8.1 调用轨迹记录命令Record Track
Record Track 命令是轨迹回放命令
➢ 新建或打开一个工程文件,在工具栏中选中高级条件
➢ 在属性窗口点击 Record Track,在工程逻辑处点击 Record Track
➢ 在其右侧的属性窗口处选择轨迹图标,点击确认按钮,可将轨迹记录加载到工程逻辑中。

➢ 间隔时间:轨迹记录时间单位为每个路点 100ms,间隔时间的含义是用多少时间播放这 100ms,例如将间隔时间设置为 50ms,则以 2 倍的速度播放轨迹,若设置为 200ms,则以 0.5 倍的速度慢放。
➢ 界面下侧运行到准备点参数输入框可以设置机械臂运动到准备点时各个关节的速度及加速度。修改后请点击确认按钮。
➢ 点击刷新为文件更新按钮,检索当前文件保存目录,更新显示文件变动。
➢ 点击移除可删除工程逻辑处的 Track_Record 命令。
19.1 变量配置
变量设置目前仅支持 bool、int、double、pose 类型的变量。表格中显示所有当前已配置的变量列表,包括变量名称,变量类型,全局保持,变量值。选中表格中某个变量,该变量信息会显示到下方的变量类型下拉列表,变量名称输入框和变量值选择/输入选项中。
bool:定义一个 bool 型变量,其变量值为 true/false,点击变量值后选项赋值。
int:定义一个整型变量,其变量值为整数,在变量值后单元格内输入赋值。
double:定义一个双精度型变量,其变量值为双精度浮点数,在变量值后单元格内输入赋值。
pose:定义一个位置型变量,其变量值为机器人路点信息,点击变量值单元格后方设置路点】按钮,跳转至机器人示教界面,完成路点设置后点击【确认】,完成变量赋值。变量 pose 的表示形式为 3 组(共 13 位)数据,其中前 3 位为位置参数,单位为米,中间 4 位为姿态参数,以四元数方式显示,单位为弧度,后 6 位为6 个关节参数,单位为弧度。可以只提供位置参数和姿态参数,或者只提供关节参数,同时提供时,关节参数优先使用,未提供的参数需用数值 0 替代。
全局保持:勾选全局保持,表示将变量值固化到数据库中,如未勾选全局保持,当程序重新运行时,变量值仍为添加变量时的初始值。
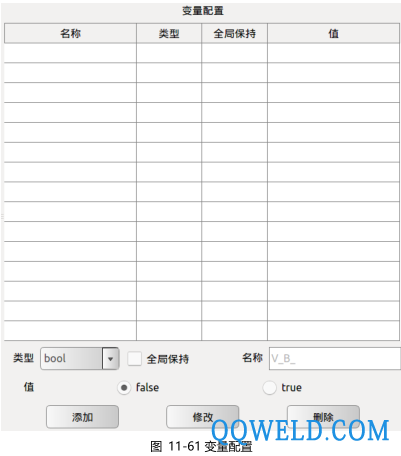
➢ 添加变量,选择一个变量类型,这时变量值选项中会相应的出现对应类型的输入选项框。输入变量名称和变量值,点击添加,如果添加成功,新添加的变量将显示到列表的底部。注意:变量名称必须唯一,只能包含数字、字母和下划线。否则保存不成功且会弹窗提示。
➢ 修改变量,在表格中选中一个变量,这时该变量的信息全部显示到下方的操作区域,可以点击修改来更改变量名称和变量值,注意:变量类型不能修改,否则会有弹窗跳出提示失败,变量名称虽然支持修改,但是如果该变量已经在已有工程文件中被使用过,那么只有在重新加载该工程时才会提示使用到旧变量名的条件为未定义的。修改完变量名,一定要重新加载工程后才可以运行工程,以防出现未知问题。
➢ 删除变量,在表格中选中一个变量,点击删除,该变量被删除。注意:删除变量与修改变量类似,在删除后,如果在已有工程文件中该变量被使用过,那么只有在重新加载该工程时才会提示使用到该变量的条件为未定义的。删除变量后,一定要重新加载工程后才可以运行工程,以防出现未知问题。
 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 PrimaPower普玛宝
PrimaPower普玛宝 Salvagnini萨瓦尼尼
Salvagnini萨瓦尼尼 奔腾激光PENTA LASER
奔腾激光PENTA LASER 华工HGTECH
华工HGTECH Bystronic百超激光
Bystronic百超激光 TRUMPF通快
TRUMPF通快 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 316材质方孔网 各种宽度滤网
316材质方孔网 各种宽度滤网 苏州生产不锈钢加筋圆网篮工厂
苏州生产不锈钢加筋圆网篮工厂 供应逆变直流脉冲氩弧焊机
供应逆变直流脉冲氩弧焊机 销售圆形铝包边筛片 多层网片
销售圆形铝包边筛片 多层网片 焊接遮光屏,机器人焊接房,焊接机器人工作房,机器人焊接工作房,焊接房,高藤门业
焊接遮光屏,机器人焊接房,焊接机器人工作房,机器人焊接工作房,焊接房,高藤门业 无锡激光切割机
无锡激光切割机 赛普ARC-250G 380V220A家用电焊机 便携式电焊机 三相小型焊机
赛普ARC-250G 380V220A家用电焊机 便携式电焊机 三相小型焊机 parker耐高低温电机NX系列-北京德和天成
parker耐高低温电机NX系列-北京德和天成








